 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForecasting Sensor Values in Waste-To-Fuel Plants: a Case Study
Paper and Code
Sep 28, 2022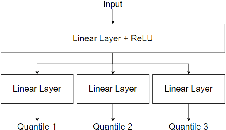
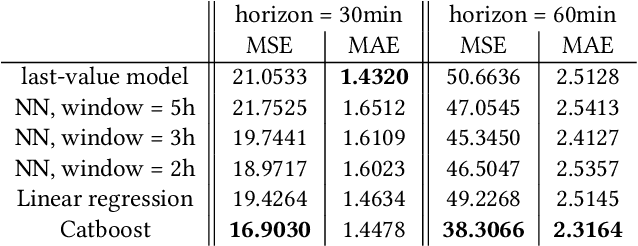
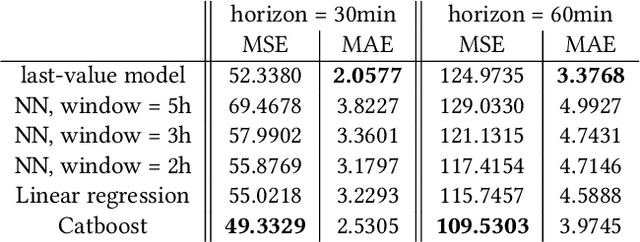
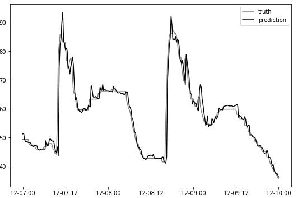
In this research, we develop machine learning models to predict future sensor readings of a waste-to-fuel plant, which would enable proactive control of the plant's operations. We developed models that predict sensor readings for 30 and 60 minutes into the future. The models were trained using historical data, and predictions were made based on sensor readings taken at a specific time. We compare three types of models: (a) a n\"aive prediction that considers only the last predicted value, (b) neural networks that make predictions based on past sensor data (we consider different time window sizes for making a prediction), and (c) a gradient boosted tree regressor created with a set of features that we developed. We developed and tested our models on a real-world use case at a waste-to-fuel plant in Canada. We found that approach (c) provided the best results, while approach (b) provided mixed results and was not able to outperform the n\"aive consistently.