 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFocal Loss Dense Detector for Vehicle Surveillance
Paper and Code
Mar 03, 2018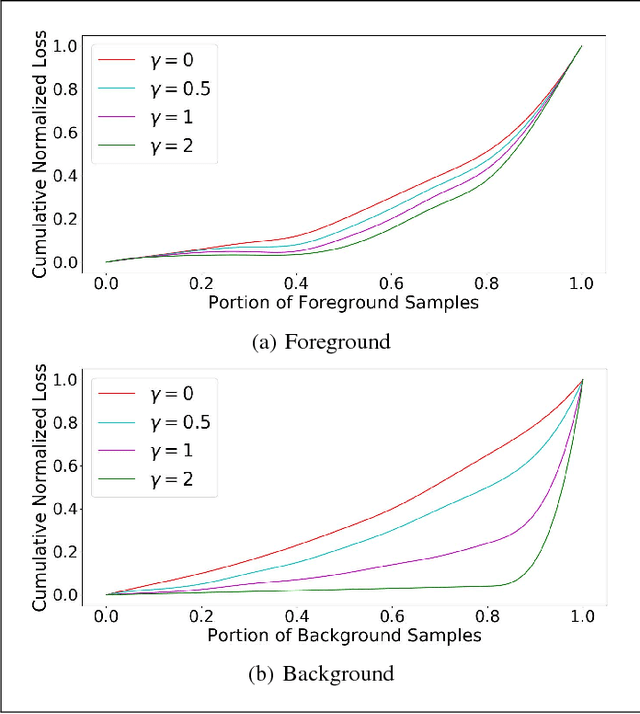
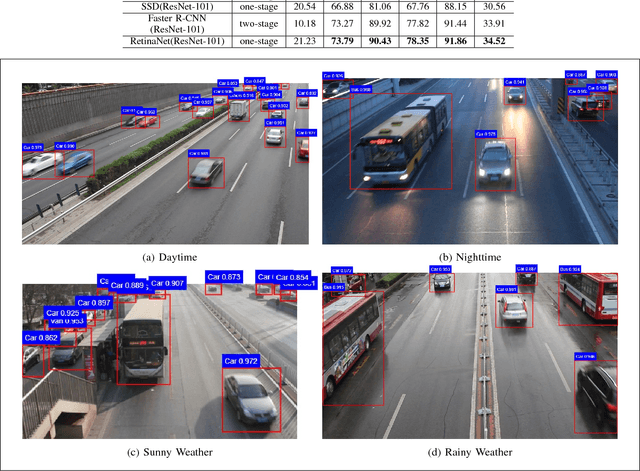
Deep learning has been widely recognized as a promising approach in different computer vision applications. Specifically, one-stage object detector and two-stage object detector are regarded as the most important two groups of Convolutional Neural Network based object detection methods. One-stage object detector could usually outperform two-stage object detector in speed; However, it normally trails in detection accuracy, compared with two-stage object detectors. In this study, focal loss based RetinaNet, which works as one-stage object detector, is utilized to be able to well match the speed of regular one-stage detectors and also defeat two-stage detectors in accuracy, for vehicle detection. State-of-the-art performance result has been showed on the DETRAC vehicle dataset.