 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinding Safe Zones of policies Markov Decision Processes
Paper and Code
Feb 23, 2022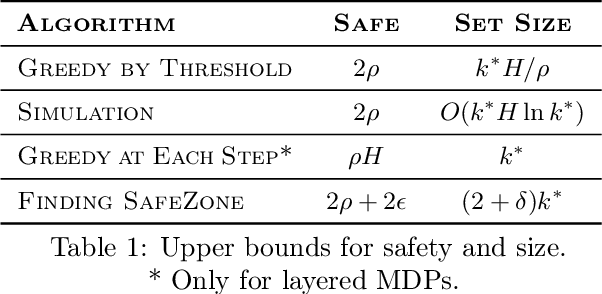
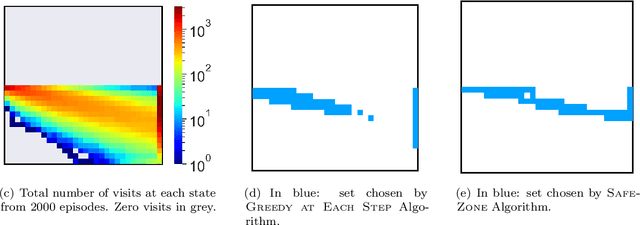
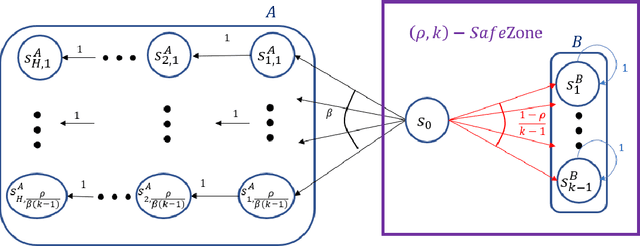
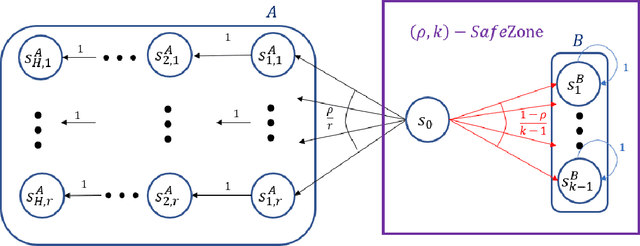
Given a policy, we define a SafeZone as a subset of states, such that most of the policy's trajectories are confined to this subset. The quality of the SafeZone is parameterized by the number of states and the escape probability, i.e., the probability that a random trajectory will leave the subset. SafeZones are especially interesting when they have a small number of states and low escape probability. We study the complexity of finding optimal SafeZones, and show that in general the problem is computationally hard. For this reason we concentrate on computing approximate SafeZones. Our main result is a bi-criteria approximation algorithm which gives a factor of almost $2$ approximation for both the escape probability and SafeZone size, using a polynomial size sample complexity. We conclude the paper with an empirical evaluation of our algorithm.