 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinding Failures in High-Fidelity Simulation using Adaptive Stress Testing and the Backward Algorithm
Paper and Code
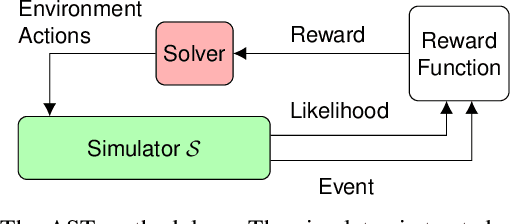

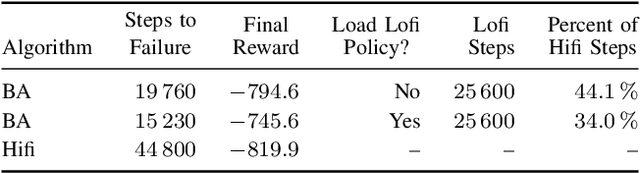
Validating the safety of autonomous systems generally requires the use of high-fidelity simulators that adequately capture the variability of real-world scenarios. However, it is generally not feasible to exhaustively search the space of simulation scenarios for failures. Adaptive stress testing (AST) is a method that uses reinforcement learning to find the most likely failure of a system. AST with a deep reinforcement learning solver has been shown to be effective in finding failures across a range of different systems. This approach generally involves running many simulations, which can be very expensive when using a high-fidelity simulator. To improve efficiency, we present a method that first finds failures in a low-fidelity simulator. It then uses the backward algorithm, which trains a deep neural network policy using a single expert demonstration, to adapt the low-fidelity failures to high-fidelity. We have created a series of autonomous vehicle validation case studies that represent some of the ways low-fidelity and high-fidelity simulators can differ, such as time discretization. We demonstrate in a variety of case studies that this new AST approach is able to find failures with significantly fewer high-fidelity simulation steps than are needed when just running AST directly in high-fidelity. As a proof of concept, we also demonstrate AST on NVIDIA's DriveSim simulator, an industry state-of-the-art high-fidelity simulator for finding failures in autonomous vehicles.