 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFederated Learning for Cellular-connected UAVs: Radio Mapping and Path Planning
Paper and Code
Aug 23, 2020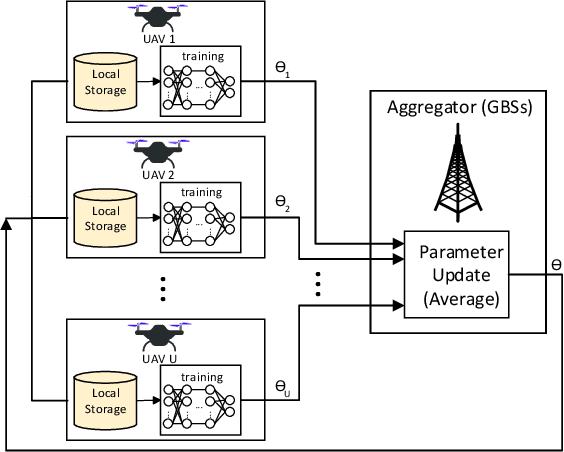
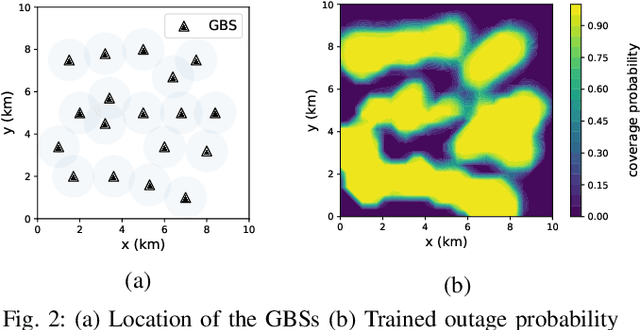
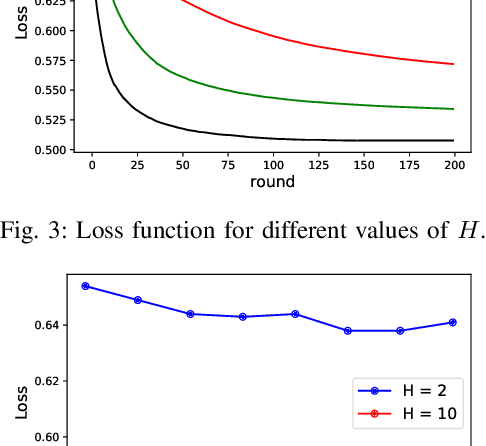
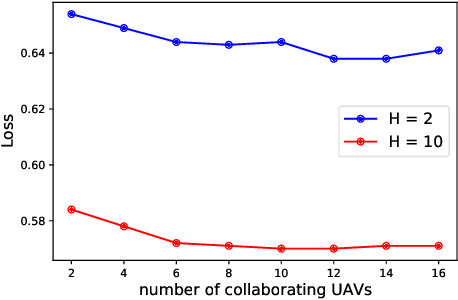
To prolong the lifetime of the unmanned aerial vehicles (UAVs), the UAVs need to fulfill their missions in the shortest possible time. In addition to this requirement, in many applications, the UAVs require a reliable internet connection during their flights. In this paper, we minimize the travel time of the UAVs, ensuring that a probabilistic connectivity constraint is satisfied. To solve this problem, we need a global model of the outage probability in the environment. Since the UAVs have different missions and fly over different areas, their collected data carry local information on the network's connectivity. As a result, the UAVs can not rely on their own experiences to build the global model. This issue affects the path planning of the UAVs. To address this concern, we utilize a two-step approach. In the first step, by using Federated Learning (FL), the UAVs collaboratively build a global model of the outage probability in the environment. In the second step, by using the global model obtained in the first step and rapidly-exploring random trees (RRTs), we propose an algorithm to optimize UAVs' paths. Simulation results show the effectiveness of this two-step approach for UAV networks.