 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Policy Learning for Linear Quadratic Control with Entropy Regularization
Paper and Code
Dec 03, 2023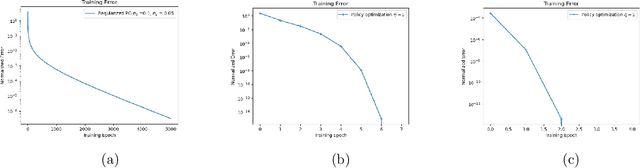
This paper proposes and analyzes two new policy learning methods: regularized policy gradient (RPG) and iterative policy optimization (IPO), for a class of discounted linear-quadratic control (LQC) problems over an infinite time horizon with entropy regularization. Assuming access to the exact policy evaluation, both proposed approaches are proven to converge linearly in finding optimal policies of the regularized LQC. Moreover, the IPO method can achieve a super-linear convergence rate once it enters a local region around the optimal policy. Finally, when the optimal policy for an RL problem with a known environment is appropriately transferred as the initial policy to an RL problem with an unknown environment, the IPO method is shown to enable a super-linear convergence rate if the two environments are sufficiently close. Performances of these proposed algorithms are supported by numerical examples.