 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Accurate, Convolutional Neural Network Based Approach for Object Detection from UAV
Paper and Code
Aug 16, 2018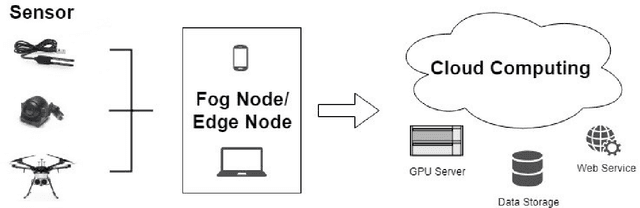
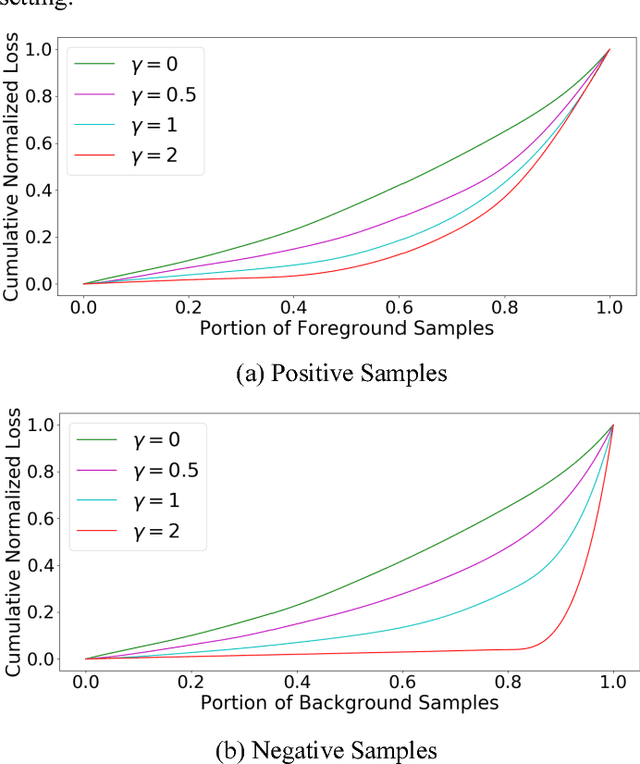
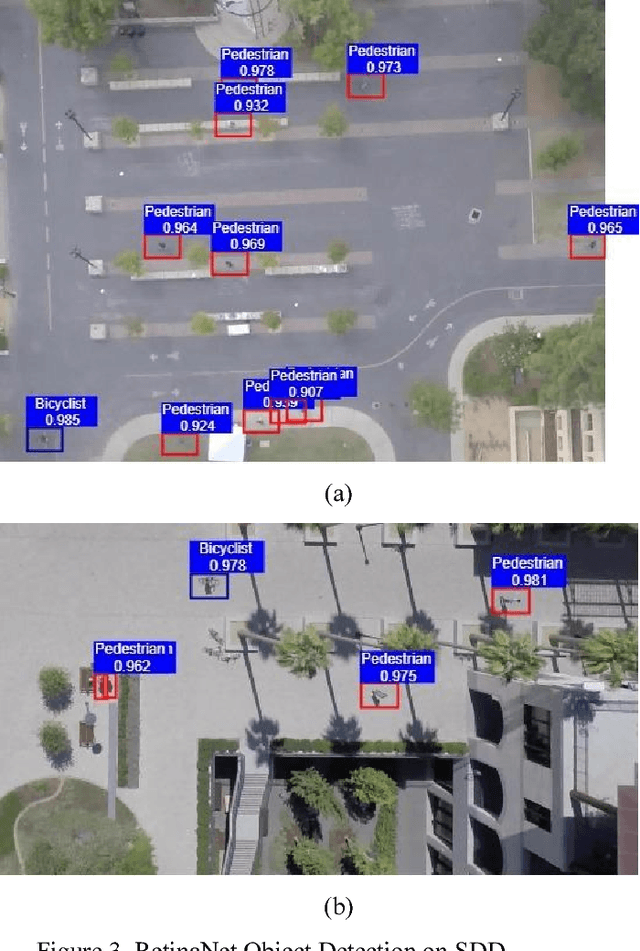
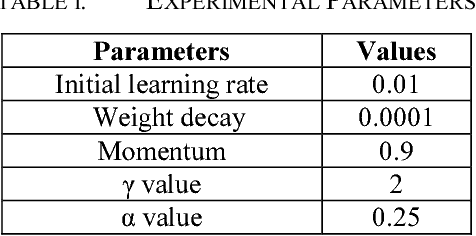
The ever-growing interest witnessed in the acquisition and development of unmanned aerial vehicles (UAVs), commonly known as drones in the past few years, has brought generation of a very promising and effective technology. Because of their characteristic of small size and fast deployment, UAVs have shown their effectiveness in collecting data over unreachable areas and restricted coverage zones. Moreover, their flexible-defined capacity enables them to collect information with a very high level of detail, leading to high resolution images. UAVs mainly served in military scenario. However, in the last decade, they have being broadly adopted in civilian applications as well. The task of aerial surveillance and situation awareness is usually completed by integrating intelligence, surveillance, observation, and navigation systems, all interacting in the same operational framework. To build this capability, UAV's are well suited tools that can be equipped with a wide variety of sensors, such as cameras or radars. Deep learning has been widely recognized as a prominent approach in different computer vision applications. Specifically, one-stage object detector and two-stage object detector are regarded as the most important two groups of Convolutional Neural Network based object detection methods. One-stage object detector could usually outperform two-stage object detector in speed; however, it normally trails in detection accuracy, compared with two-stage object detectors. In this study, focal loss based RetinaNet, which works as one-stage object detector, is utilized to be able to well match the speed of regular one-stage detectors and also defeat two-stage detectors in accuracy, for UAV based object detection. State-of-the-art performance result has been showed on the UAV captured image dataset-Stanford Drone Dataset (SDD).