 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFactored Latent Analysis for far-field tracking data
Paper and Code
Jul 11, 2012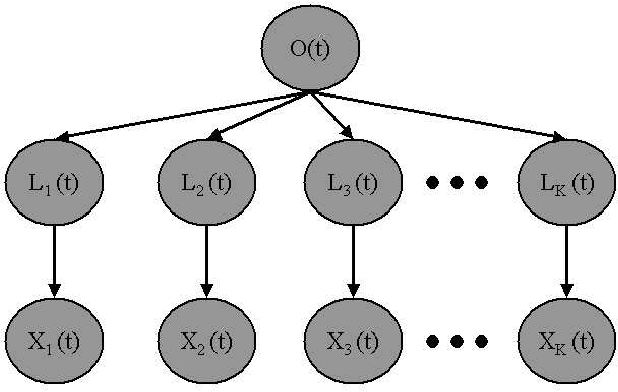

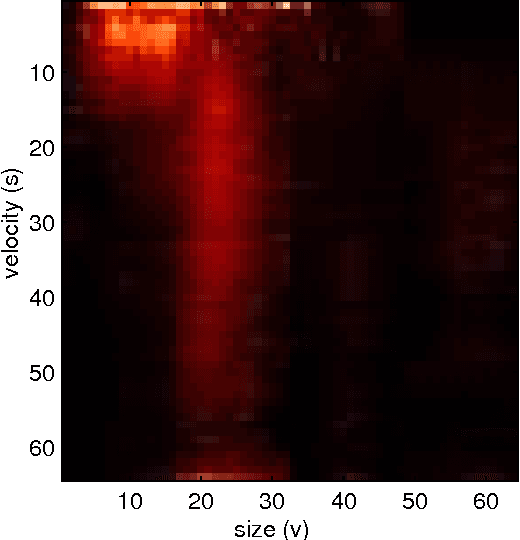

This paper uses Factored Latent Analysis (FLA) to learn a factorized, segmental representation for observations of tracked objects over time. Factored Latent Analysis is latent class analysis in which the observation space is subdivided and each aspect of the original space is represented by a separate latent class model. One could simply treat these factors as completely independent and ignore their interdependencies or one could concatenate them together and attempt to learn latent class structure for the complete observation space. Alternatively, FLA allows the interdependencies to be exploited in estimating an effective model, which is also capable of representing a factored latent state. In this paper, FLA is used to learn a set of factored latent classes to represent different modalities of observations of tracked objects. Different characteristics of the state of tracked objects are each represented by separate latent class models, including normalized size, normalized speed, normalized direction, and position. This model also enables effective temporal segmentation of these sequences. This method is data-driven, unsupervised using only pairwise observation statistics. This data-driven and unsupervised activity classi- fication technique exhibits good performance in multiple challenging environments.