 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtraction and Assessment of Naturalistic Human Driving Trajectories from Infrastructure Camera and Radar Sensors
Paper and Code
Apr 02, 2020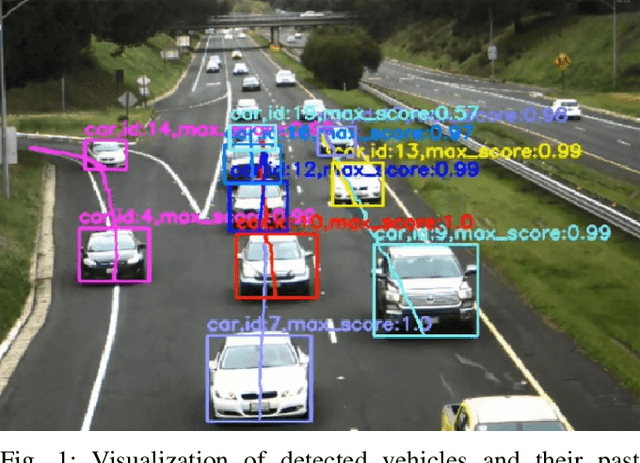

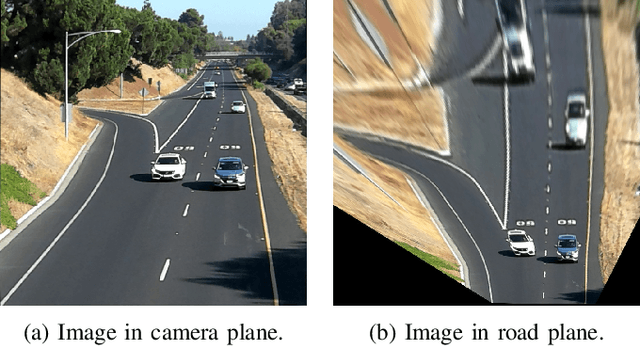
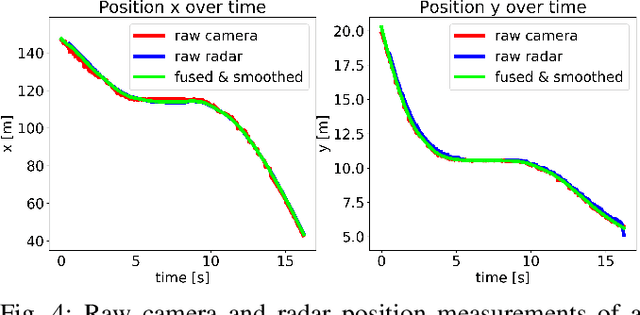
Collecting realistic driving trajectories is crucial for training machine learning models that imitate human driving behavior. Most of today's autonomous driving datasets contain only a few trajectories per location and are recorded with test vehicles that are cautiously driven by trained drivers. In particular in interactive scenarios such as highway merges, the test driver's behavior significantly influences other vehicles. This influence prevents recording the whole traffic space of human driving behavior. In this work, we present a novel methodology to extract trajectories of traffic objects using infrastructure sensors. Infrastructure sensors allow us to record a lot of data for one location and take the test drivers out of the loop. We develop both a hardware setup consisting of a camera and a traffic surveillance radar and a trajectory extraction algorithm. Our vision pipeline accurately detects objects, fuses camera and radar detections and tracks them over time. We improve a state-of-the-art object tracker by combining the tracking in image coordinates with a Kalman filter in road coordinates. We show that our sensor fusion approach successfully combines the advantages of camera and radar detections and outperforms either single sensor. Finally, we also evaluate the accuracy of our trajectory extraction pipeline. For that, we equip our test vehicle with a differential GPS sensor and use it to collect ground truth trajectories. With this data we compute the measurement errors. While we use the mean error to de-bias the trajectories, the error standard deviation is in the magnitude of the ground truth data inaccuracy. Hence, the extracted trajectories are not only naturalistic but also highly accurate and prove the potential of using infrastructure sensors to extract real-world trajectories.