 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtensible Grounding of Speech for Robot Instruction
Paper and Code
Jul 31, 2018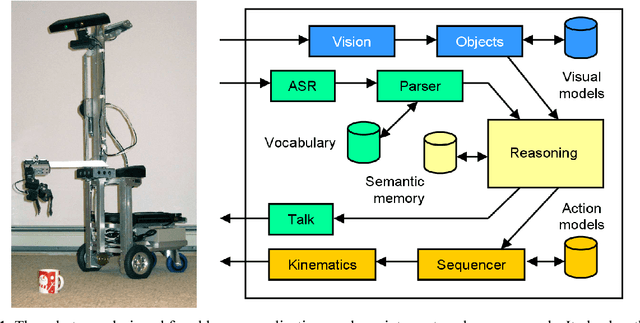

Spoken language is a convenient interface for commanding a mobile robot. Yet for this to work a number of base terms must be grounded in perceptual and motor skills. We detail the language processing used on our robot ELI and explain how this grounding is performed, how it interacts with user gestures, and how it handles phenomena such as anaphora. More importantly, however, there are certain concepts which the robot cannot be preprogrammed with, such as the names of various objects in a household or the nature of specific tasks it may be requested to perform. In these cases it is vital that there exist a method for extending the grounding, essentially "learning by being told". We describe how this was successfully implemented for learning new nouns and verbs in a tabletop setting. Creating this language learning kernel may be the last explicit programming the robot ever needs - the core mechanism could eventually be used for imparting a vast amount of knowledge, much as a child learns from its parents and teachers.