 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtending Factor Graphs so as to Unify Directed and Undirected Graphical Models
Paper and Code
Oct 19, 2012
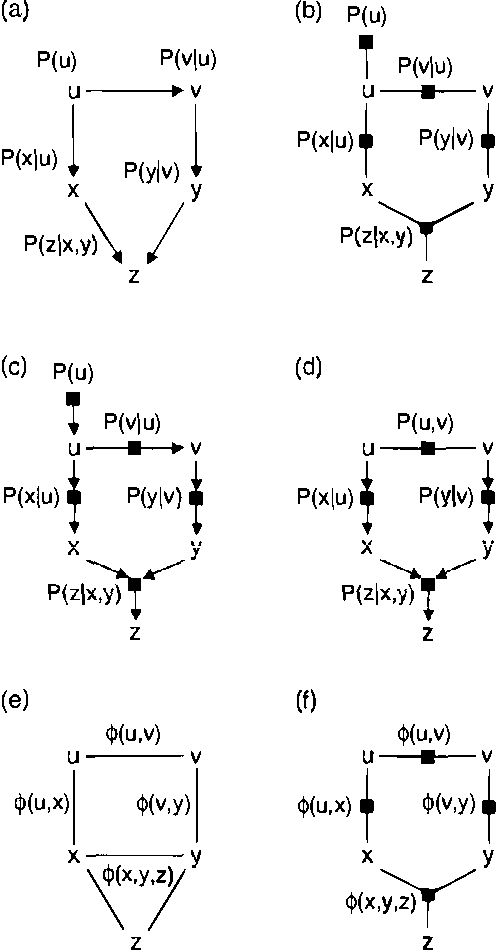


The two most popular types of graphical model are directed models (Bayesian networks) and undirected models (Markov random fields, or MRFs). Directed and undirected models offer complementary properties in model construction, expressing conditional independencies, expressing arbitrary factorizations of joint distributions, and formulating message-passing inference algorithms. We show that the strengths of these two representations can be combined in a single type of graphical model called a 'factor graph'. Every Bayesian network or MRF can be easily converted to a factor graph that expresses the same conditional independencies, expresses the same factorization of the joint distribution, and can be used for probabilistic inference through application of a single, simple message-passing algorithm. In contrast to chain graphs, where message-passing is implemented on a hypergraph, message-passing can be directly implemented on the factor graph. We describe a modified 'Bayes-ball' algorithm for establishing conditional independence in factor graphs, and we show that factor graphs form a strict superset of Bayesian networks and MRFs. In particular, we give an example of a commonly-used 'mixture of experts' model fragment, whose independencies cannot be represented in a Bayesian network or an MRF, but can be represented in a factor graph. We finish by giving examples of real-world problems that are not well suited to representation in Bayesian networks and MRFs, but are well-suited to representation in factor graphs.