 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtending 6D Object Pose Estimators for Stereo Vision
Paper and Code
Feb 08, 2024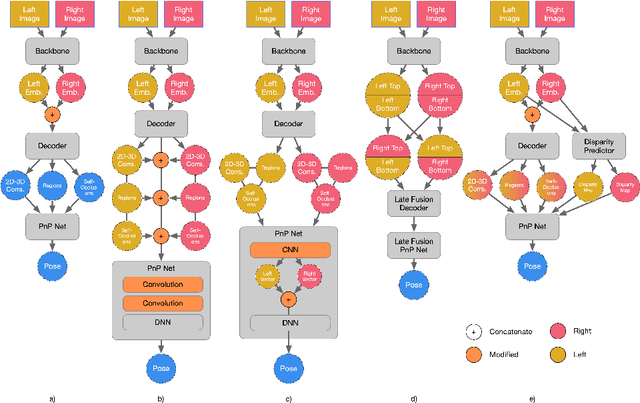

Estimating the 6D pose of objects accurately, quickly, and robustly remains a difficult task. However, recent methods for directly regressing poses from RGB images using dense features have achieved state-of-the-art results. Stereo vision, which provides an additional perspective on the object, can help reduce pose ambiguity and occlusion. Moreover, stereo can directly infer the distance of an object, while mono-vision requires internalized knowledge of the object's size. To extend the state-of-the-art in 6D object pose estimation to stereo, we created a BOP compatible stereo version of the YCB-V dataset. Our method outperforms state-of-the-art 6D pose estimation algorithms by utilizing stereo vision and can easily be adopted for other dense feature-based algorithms.