 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring Zero-Shot Emergent Communication in Embodied Multi-Agent Populations
Paper and Code

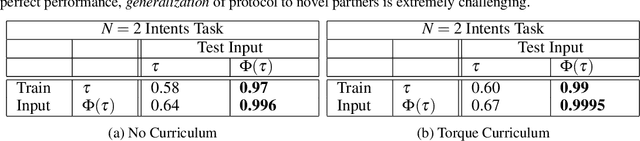


Effective communication is an important skill for enabling information exchange and cooperation in multi-agent settings. Indeed, emergent communication is now a vibrant field of research, with common settings involving discrete cheap-talk channels. One limitation of this setting is that it does not allow for the emergent protocols to generalize beyond the training partners. Furthermore, so far emergent communication has primarily focused on the use of symbolic channels. In this work, we extend this line of work to a new modality, by studying agents that learn to communicate via actuating their joints in a 3D environment. We show that under realistic assumptions, a non-uniform distribution of intents and a common-knowledge energy cost, these agents can find protocols that generalize to novel partners. We also explore and analyze specific difficulties associated with finding these solutions in practice. Finally, we propose and evaluate initial training improvements to address these challenges, involving both specific training curricula and providing the latent feature that can be coordinated on during training.