 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring the trade off between human driving imitation and safety for traffic simulation
Paper and Code
Aug 09, 2022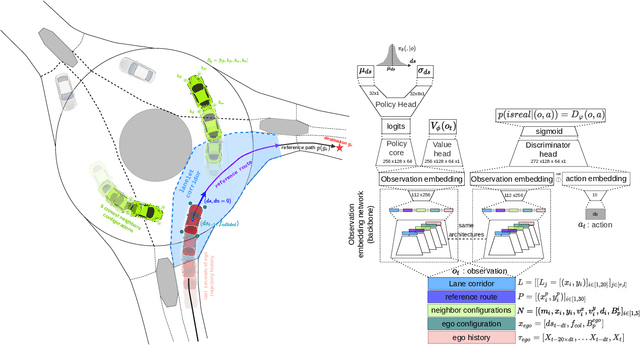
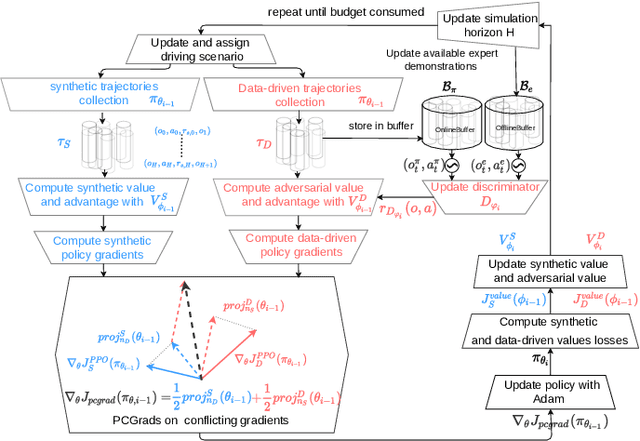

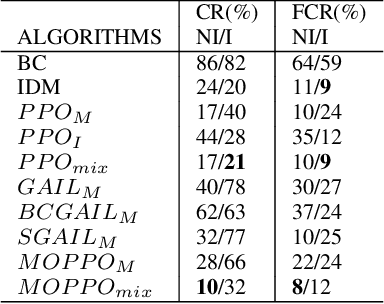
Traffic simulation has gained a lot of interest for quantitative evaluation of self driving vehicles performance. In order for a simulator to be a valuable test bench, it is required that the driving policy animating each traffic agent in the scene acts as humans would do while maintaining minimal safety guarantees. Learning the driving policies of traffic agents from recorded human driving data or through reinforcement learning seems to be an attractive solution for the generation of realistic and highly interactive traffic situations in uncontrolled intersections or roundabouts. In this work, we show that a trade-off exists between imitating human driving and maintaining safety when learning driving policies. We do this by comparing how various Imitation learning and Reinforcement learning algorithms perform when applied to the driving task. We also propose a multi objective learning algorithm (MOPPO) that improves both objectives together. We test our driving policies on highly interactive driving scenarios extracted from INTERACTION Dataset to evaluate how human-like they behave.