 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring the potential of combining time of flight and thermal infrared cameras for person detection
Paper and Code
Dec 07, 2016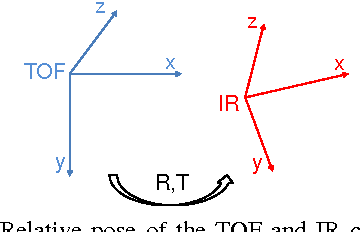

Combining new, low-cost thermal infrared and time-of-flight range sensors provides new opportunities. In this position paper we explore the possibilities of combining these sensors and using their fused data for person detection. The proposed calibration approach for this sensor combination differs from the traditional stereo camera calibration in two fundamental ways. A first distinction is that the spectral sensitivity of the two sensors differs significantly. In fact, there is no sensitivity range overlap at all. A second distinction is that their resolution is typically very low, which requires special attention. We assume a situation in which the sensors' relative position is known, but their orientation is unknown. In addition, some of the typical measurement errors are discussed, and methods to compensate for them are proposed. We discuss how the fused data could allow increased accuracy and robustness without the need for complex algorithms requiring large amounts of computational power and training data.