 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring the Adjugate Matrix Approach to Quaternion Pose Extraction
Paper and Code
May 17, 2022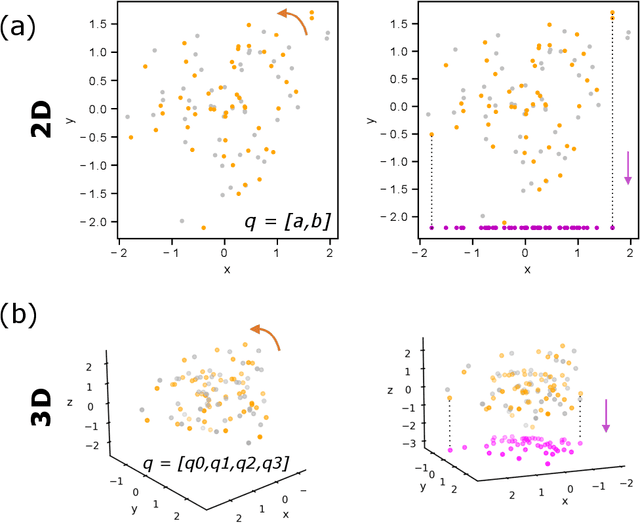
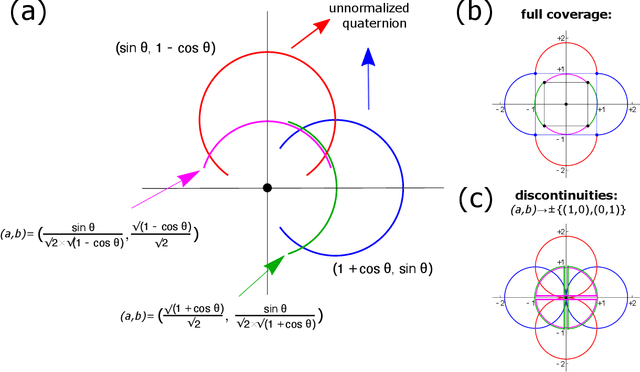
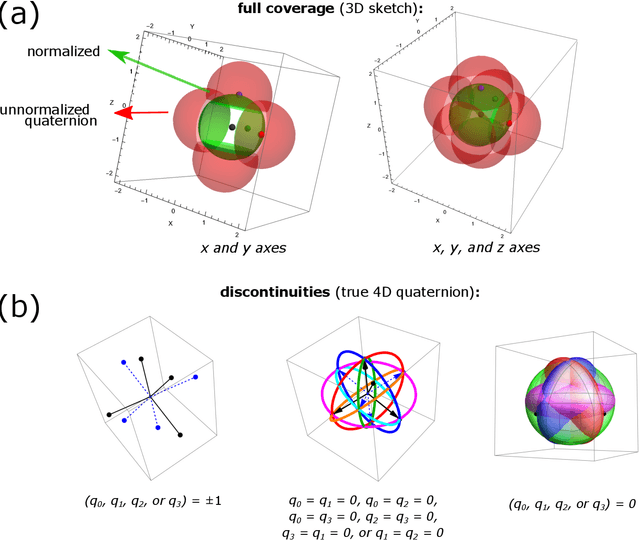
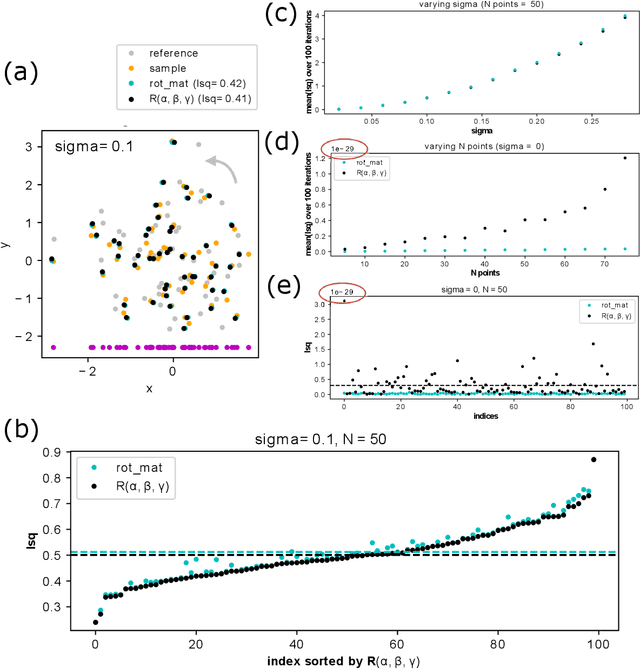
Quaternions are important for a wide variety of rotation-related problems in computer graphics, machine vision, and robotics. We study the nontrivial geometry of the relationship between quaternions and rotation matrices by exploiting the adjugate matrix of the characteristic equation of a related eigenvalue problem to obtain the manifold of the space of a quaternion eigenvector. We argue that quaternions parameterized by their corresponding rotation matrices cannot be expressed, for example, in machine learning tasks, as single-valued functions: the quaternion solution must instead be treated as a manifold, with different algebraic solutions for each of several single-valued sectors represented by the adjugate matrix. We conclude with novel constructions exploiting the quaternion adjugate variables to revisit several classic pose estimation applications: 2D point-cloud matching, 2D point-cloud-to-projection matching, 3D point-cloud matching, 3D orthographic point-cloud-to-projection matching, and 3D perspective point-cloud-to-projection matching. We find an exact solution to the 3D orthographic least squares pose extraction problem, and apply it successfully also to the perspective pose extraction problem with results that improve on existing methods.