 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplicit Motion Risk Representation
Paper and Code
Apr 16, 2019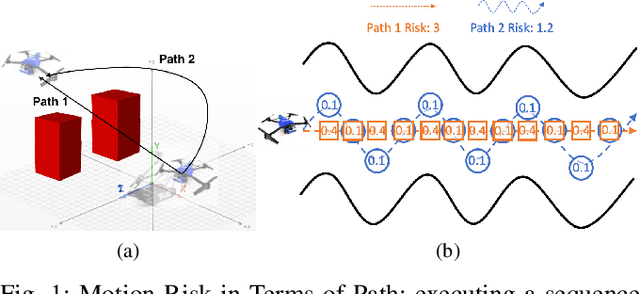
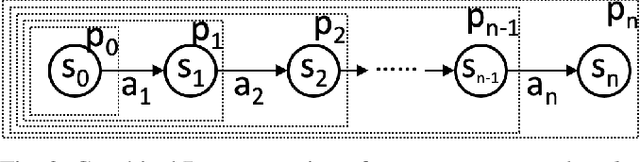
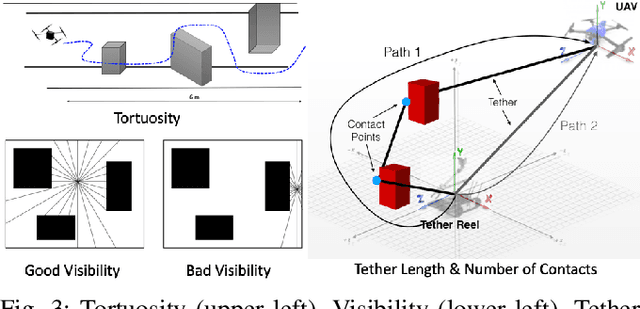

This paper presents a formal definition and explicit representation of robot motion risk. Currently, robot motion risk has not been formally defined, but has already been used in motion and path planning. Risk is either implicitly represented as model uncertainty using probabilistic approaches, where the definition of risk is somewhat avoided, or explicitly modeled as a simple function of states, without a formal definition. In this work, we provide formal reasoning behind what risk is for robot motion and propose a formal definition of risk in terms of a sequence of motion, namely path. Mathematical approaches to represent motion risk are also presented, which is in accordance with our risk definition and properties. The definition and representation of risk provide a meaningful way to evaluate or construct robot motion or path plans. The understanding of risk is even of greater interest for the search and rescue community: the deconstructed environments cast extra risk onto the robot, since they are working under extreme conditions. A proper risk representation has the potential to reduce robot failure in the field.