 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplanation Generation for Multi-Modal Multi-Agent Path Finding with Optimal Resource Utilization using Answer Set Programming
Paper and Code
Aug 08, 2020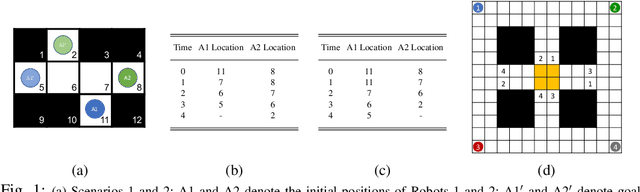
The multi-agent path finding (MAPF) problem is a combinatorial search problem that aims at finding paths for multiple agents (e.g., robots) in an environment (e.g., an autonomous warehouse) such that no two agents collide with each other, and subject to some constraints on the lengths of paths. We consider a general version of MAPF, called mMAPF, that involves multi-modal transportation modes (e.g., due to velocity constraints) and consumption of different types of resources (e.g., batteries). The real-world applications of mMAPF require flexibility (e.g., solving variations of mMAPF) as well as explainability. Our earlier studies on mMAPF have focused on the former challenge of flexibility. In this study, we focus on the latter challenge of explainability, and introduce a method for generating explanations for queries regarding the feasibility and optimality of solutions, the nonexistence of solutions, and the observations about solutions. Our method is based on answer set programming. This paper is under consideration for acceptance in TPLP.