 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperiments in Artificial Culture: from noisy imitation to storytelling robots
Paper and Code
Jun 22, 2021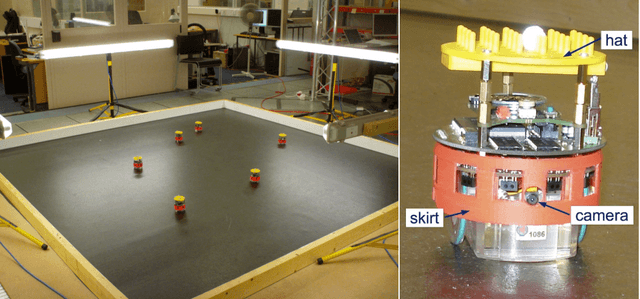
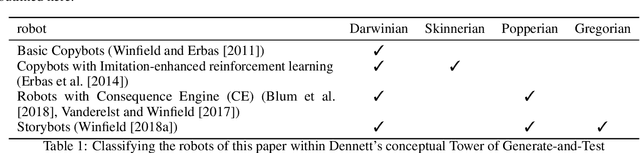
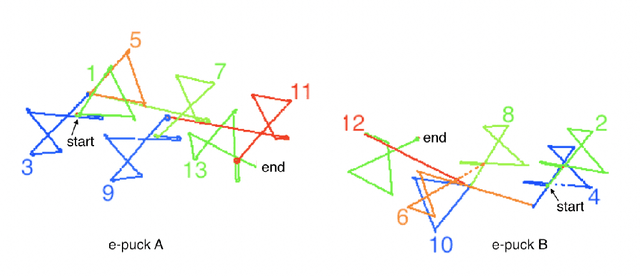
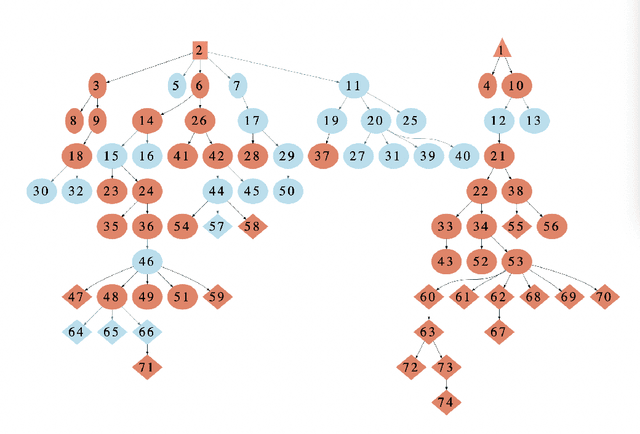
This paper presents a series of experiments in collective social robotics, spanning more than 10 years, with the long-term aim of building embodied models of (aspects) of cultural evolution. Initial experiments demonstrated the emergence of behavioural traditions in a group of social robots programmed to imitate each other's behaviours (we call these Copybots). These experiments show that the noisy (i.e. less than perfect fidelity) imitation that comes for free with real physical robots gives rise naturally to variation in social learning. More recent experimental work extends the robots' cognitive capabilities with simulation-based internal models, equipping them with a simple artificial theory of mind. With this extended capability we explore, in our current work, social learning not via imitation but robot-robot storytelling, in an effort to model this very human mode of cultural transmission. In this paper we give an account of the methods and inspiration for these experiments, the experiments and their results, and an outline of possible directions for this programme of research. It is our hope that this paper stimulates not only discussion but suggestions for hypotheses to test with the Storybots.