 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperimental Evaluation of Pose Initialization Methods for Relative Navigation Between Non-Cooperative Satellites
Paper and Code
Jun 21, 2022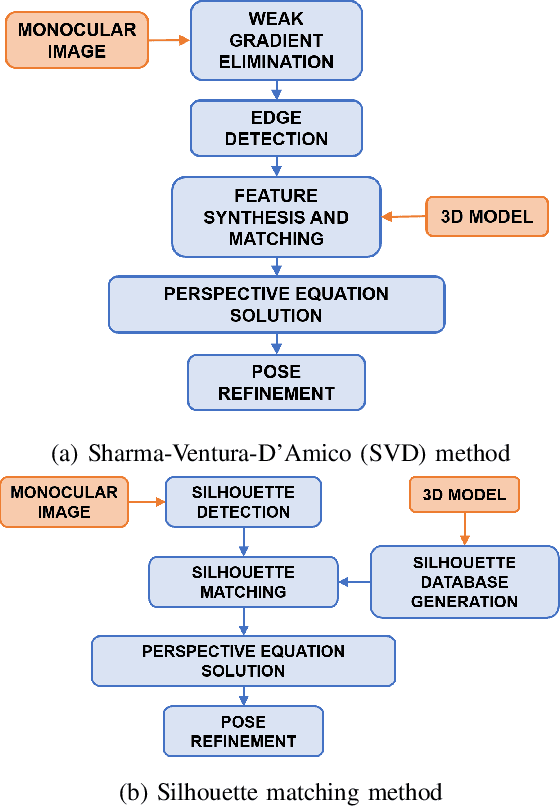



In this work, we have analyzed the problem of relative pose initialization between two satellites: a chaser and a non-cooperating target. The analysis has been targeted to two close-range methods based on a monocular camera system: the Sharma-Ventura-D'Amico (SVD) method and the silhouette matching method. Both methods are based on a priori knowledge of the target geometry, but neither fiducial markers nor a priori range measurements or state information are needed. The tests were carried out using a 2U CubeSat mock-up as target attached to a motorized rotary stage to simulate its relative motion with respect to the chaser camera. A motion capture system was used as a reference instrument that provides the fiducial relative motion between the two mock-ups and allows to evaluate the performances of the initialization algorithms analyzed.