 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperimental Analysis of Design Elements of Scalarizing Functions-based Multiobjective Evolutionary Algorithms
Paper and Code
Mar 28, 2017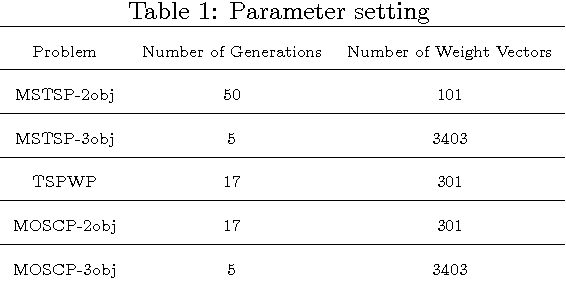
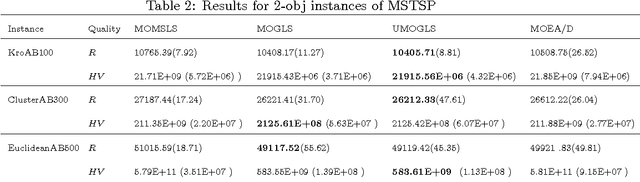
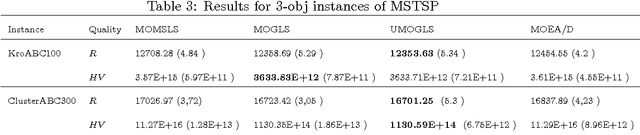

In this paper we systematically study the importance, i.e., the influence on performance, of the main design elements that differentiate scalarizing functions-based multiobjective evolutionary algorithms (MOEAs). This class of MOEAs includes Multiobjecitve Genetic Local Search (MOGLS) and Multiobjective Evolutionary Algorithm Based on Decomposition (MOEA/D) and proved to be very successful in multiple computational experiments and practical applications. The two algorithms share the same common structure and differ only in two main aspects. Using three different multiobjective combinatorial optimization problems, i.e., the multiobjective symmetric traveling salesperson problem, the traveling salesperson problem with profits, and the multiobjective set covering problem, we show that the main differentiating design element is the mechanism for parent selection, while the selection of weight vectors, either random or uniformly distributed, is practically negligible if the number of uniform weight vectors is sufficiently large.