 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExoskeleton Knee Compliance Improves Gait Velocity and Stability in a Spinal Cord Injured User: A Case Report
Paper and Code
Oct 31, 2019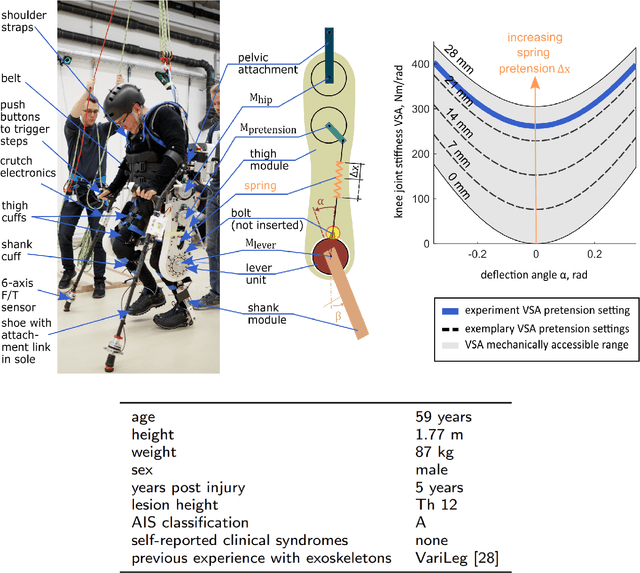
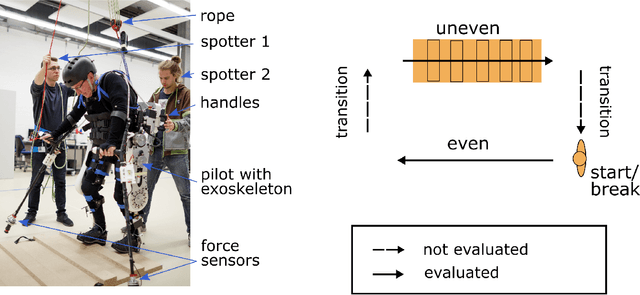
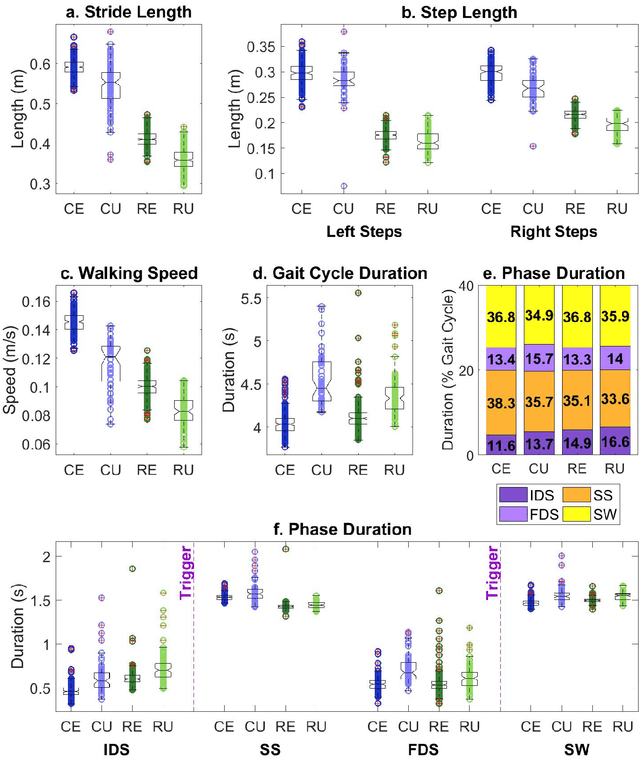
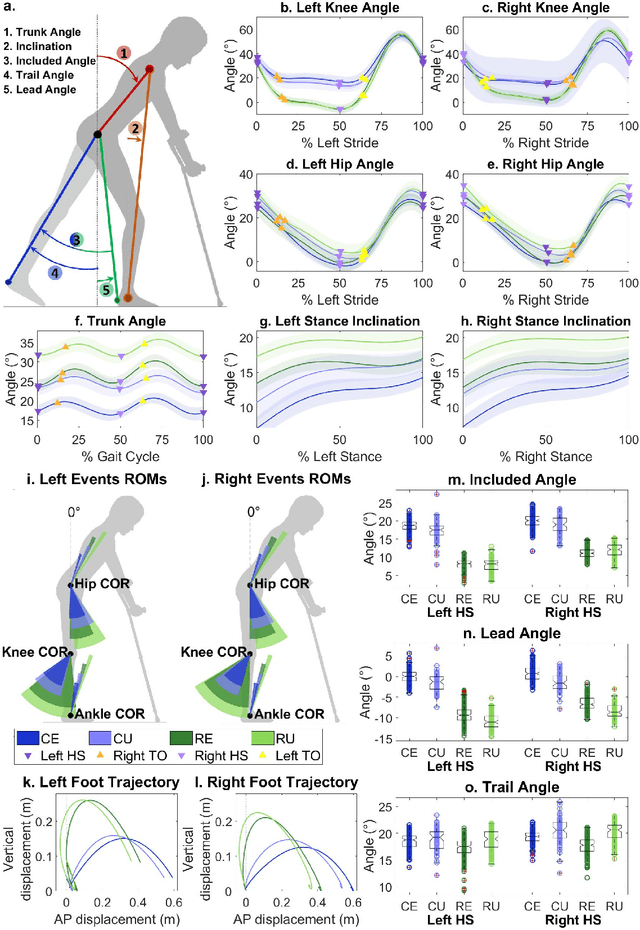
Spinal cord injuries frequently impair the ability to walk. Powered lower limb exoskeletons offer a promising solution to restore walking ability. However, they are currently restricted to even ground. We hypothesized that compliant exoskeleton knees could decrease required effort to maneuver on uneven terrain, and increase gait velocity and stability. We describe a case study of a motor-complete spinal cord injury user (AIS A, Th12) walking with a powered exoskeleton on even and uneven ground over multiple sessions after extensive training. Measurements with compliant or rigid exoskeleton knee joints were performed on three different days for each configuration. Body motion and crutch ground interaction forces were recorded to assess gait performance. We observed higher walking speeds with a compliant exoskeleton knee configuration (mean: 0.116 m/s on uneven and 0.145 m/s on even ground) compared to a rigid configuration (mean: 0.083 m/s and 0.100 m/s). Crutch force impulse was significantly reduced in the compliant configuration. Lastly, gait was more symmetric when the knee joints were compliant. In conclusion, compliant exoskeleton knee joints can help maneuver uneven ground faster and with less user effort than rigid joints. Based on our findings, exoskeleton designers should consider introducing compliance into their design to increase gait robustness and performance, and render exoskeletons more suitable for daily life use.