Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEveryday Finger: A Robotic Finger that Meets the Needs of Everyday Interactive Manipulation
Paper and Code
Aug 08, 2024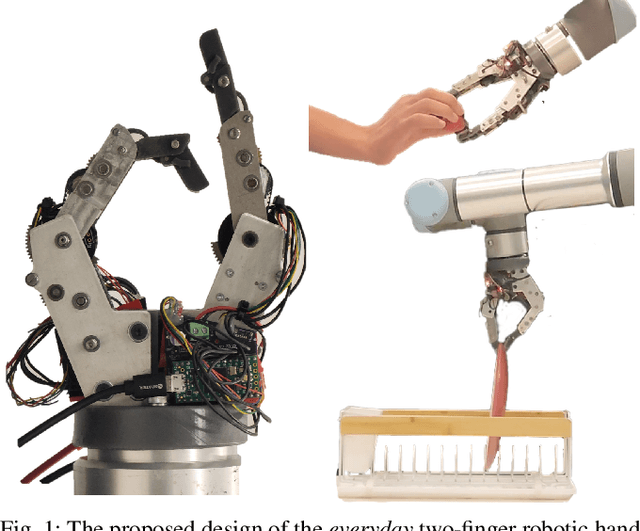


We provide the mechanical and dynamical requirements for a robotic finger capable of performing thirty diverse everyday tasks. To match these requirements, we present a finger design based on series-elastic actuation that we call the everyday finger. Our focus is to make the fingers as compact as possible while achieving the desired performance. We evaluated everyday fingers by constructing a two-finger robotic hand that was tested on various performance parameters and tasks like picking and placing dishes in a rack, picking thin and flat objects like paper and delicate objects such as strawberries. Videos are available at the project website: https://sites.google.com/view/everydayfinger.
* 9.5 pages + references, 14 figures, extended/updated version of
article to appear in IEEE ICRA 2024 proceedings
View paper on