Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvent Representation with Sequential, Semi-Supervised Discrete Variables
Paper and Code
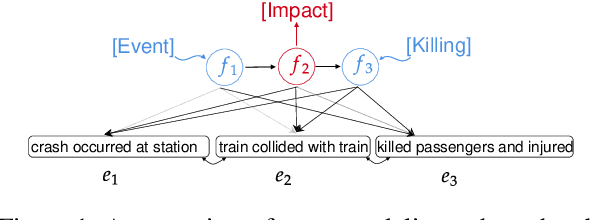
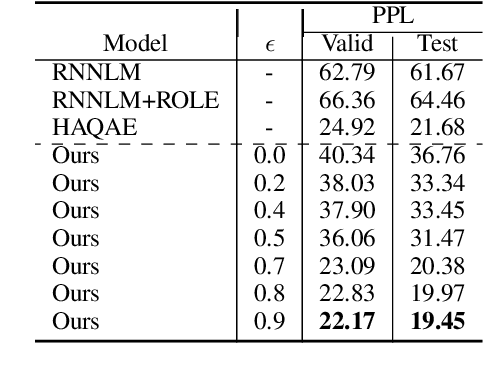
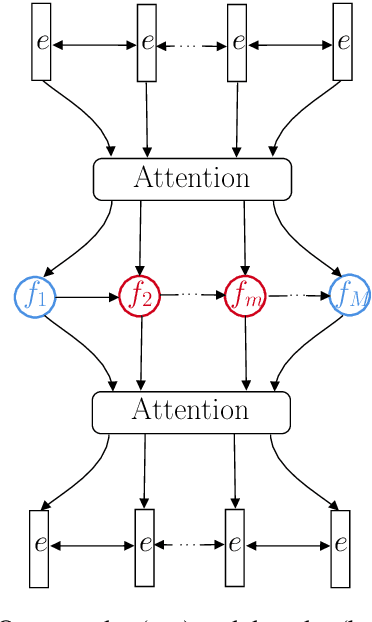
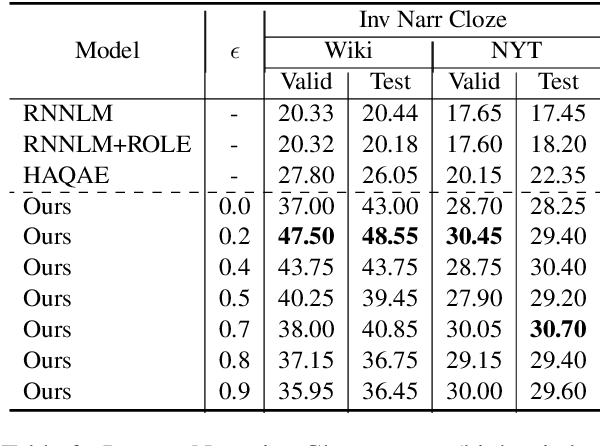
Within the context of event modeling and understanding, we propose a new method for neural sequence modeling that takes partially-observed sequences of discrete, external knowledge into account. We construct a sequential, neural variational autoencoder that uses a carefully defined encoder, and Gumbel-Softmax reparametrization, to allow for successful backpropagation during training. We show that our approach outperforms multiple baselines and the state-of-the-art in narrative script induction on multiple event modeling tasks. We demonstrate that our approach converges more quickly.
View paper on