 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvasion Paths in Mobile Sensor Networks
Paper and Code
Jan 24, 2014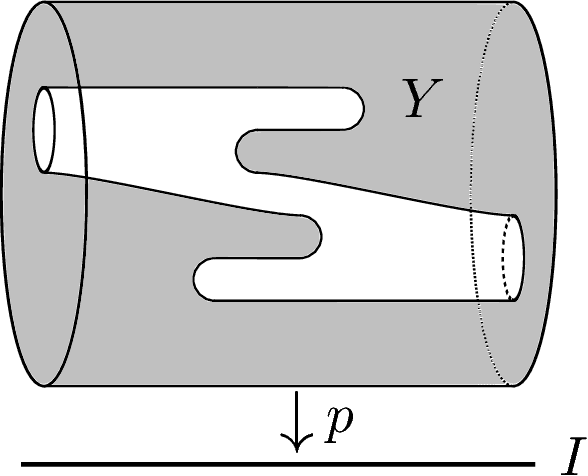

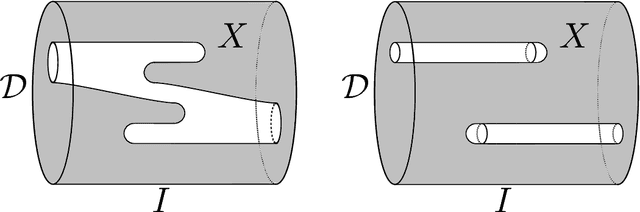

Suppose that ball-shaped sensors wander in a bounded domain. A sensor doesn't know its location but does know when it overlaps a nearby sensor. We say that an evasion path exists in this sensor network if a moving intruder can avoid detection. In "Coordinate-free coverage in sensor networks with controlled boundaries via homology", Vin deSilva and Robert Ghrist give a necessary condition, depending only on the time-varying connectivity data of the sensors, for an evasion path to exist. Using zigzag persistent homology, we provide an equivalent condition that moreover can be computed in a streaming fashion. However, no method with time-varying connectivity data as input can give necessary and sufficient conditions for the existence of an evasion path. Indeed, we show that the existence of an evasion path depends not only on the fibrewise homotopy type of the region covered by sensors but also on its embedding in spacetime. For planar sensors that also measure weak rotation and distance information, we provide necessary and sufficient conditions for the existence of an evasion path.