Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluation and Optimization of Rendering Techniques for Autonomous Driving Simulation
Paper and Code
Jun 27, 2023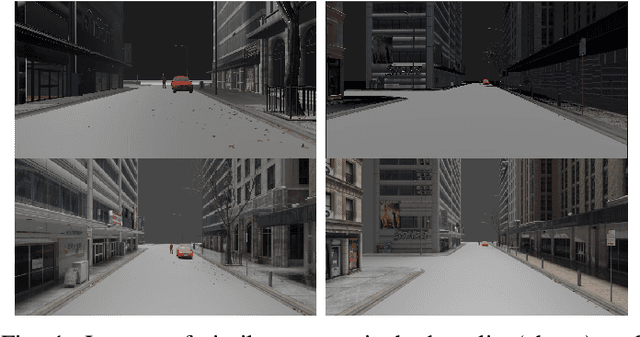
In order to meet the demand for higher scene rendering quality from some autonomous driving teams (such as those focused on CV), we have decided to use an offline simulation industrial rendering framework instead of real-time rendering in our autonomous driving simulator. Our plan is to generate lower-quality scenes using a game engine, extract them, and then use an IQA algorithm to validate the improvement in scene quality achieved through offline rendering. The improved scenes will then be used for training.
View paper on