Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimation of User's World Model Using Graph2vec
Paper and Code
Jan 10, 2023


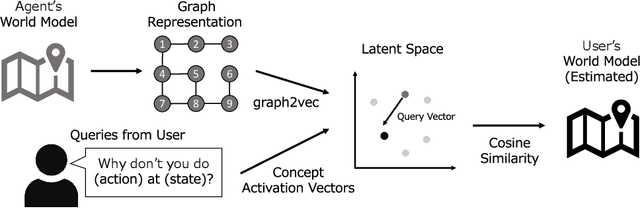
To obtain advanced interaction between autonomous robots and users, robots should be able to distinguish their state space representations (i.e., world models). Herein, a novel method was proposed for estimating the user's world model based on queries. In this method, the agent learns the distributed representation of world models using graph2vec and generates concept activation vectors that represent the meaning of queries in the latent space. Experimental results revealed that the proposed method can estimate the user's world model more efficiently than the simple method of using the ``AND'' search of queries.
View paper on