 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating Risk Levels of Driving Scenarios through Analysis of Driving Styles for Autonomous Vehicles
Paper and Code
Apr 23, 2019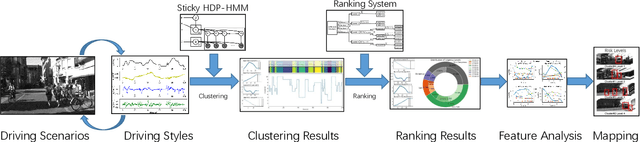

In order to operate safely on the road, autonomous vehicles need not only to be able to identify objects in front of them, but also to be able to estimate the risk level of the object in front of the vehicle automatically. It is obvious that different objects have different levels of danger to autonomous vehicles. An evaluation system is needed to automatically determine the danger level of the object for the autonomous vehicle. It would be too subjective and incomplete if the system were completely defined by humans. Based on this, we propose a framework based on nonparametric Bayesian learning method -- a sticky hierarchical Dirichlet process hidden Markov model(sticky HDP-HMM), and discover the relationship between driving scenarios and driving styles. We use the analysis of driving styles of autonomous vehicles to reflect the risk levels of driving scenarios to the vehicles. In this framework, we firstly use sticky HDP-HMM to extract driving styles from the dataset and get different clusters, then an evaluation system is proposed to evaluate and rank the urgency levels of the clusters. Finally, we map the driving scenarios to the ranking results and thus get clusters of driving scenarios in different risk levels. More importantly, we find the relationship between driving scenarios and driving styles. The experiment shows that our framework can cluster and rank driving styles of different urgency levels and find the relationship between driving scenarios and driving styles and the conclusions also fit people's common sense when driving. Furthermore, this framework can be used for autonomous vehicles to estimate risk levels of driving scenarios and help them make precise and safe decisions.