 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnsuring smoothly navigable approximation sets by Bezier curve parameterizations in evolutionary bi-objective optimization -- applied to brachytherapy treatment planning for prostate cancer
Paper and Code



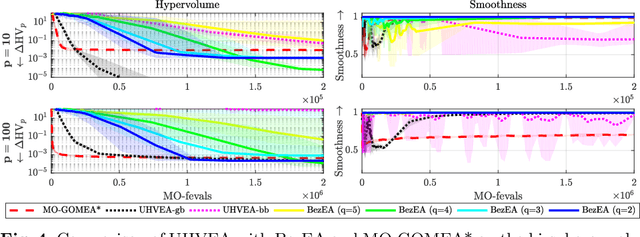
The aim of bi-objective optimization is to obtain an approximation set of (near) Pareto optimal solutions. A decision maker then navigates this set to select a final desired solution, often using a visualization of the approximation front. The front provides a navigational ordering of solutions to traverse, but this ordering does not necessarily map to a smooth trajectory through decision space. This forces the decision maker to inspect the decision variables of each solution individually, potentially making navigation of the approximation set unintuitive. In this work, we aim to improve approximation set navigability by enforcing a form of smoothness or continuity between solutions in terms of their decision variables. Imposing smoothness as a restriction upon common domination-based multi-objective evolutionary algorithms is not straightforward. Therefore, we use the recently introduced uncrowded hypervolume (UHV) to reformulate the multi-objective optimization problem as a single-objective problem in which parameterized approximation sets are directly optimized. We study here the case of parameterizing approximation sets as smooth Bezier curves in decision space. We approach the resulting single-objective problem with the gene-pool optimal mixing evolutionary algorithm (GOMEA), and we call the resulting algorithm BezEA. We analyze the behavior of BezEA and compare it to optimization of the UHV with GOMEA as well as the domination-based multi-objective GOMEA. We show that high-quality approximation sets can be obtained with BezEA, sometimes even outperforming the domination- and UHV-based algorithms, while smoothness of the navigation trajectory through decision space is guaranteed.