 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnsemble Quantile Networks: Uncertainty-Aware Reinforcement Learning with Applications in Autonomous Driving
Paper and Code
May 21, 2021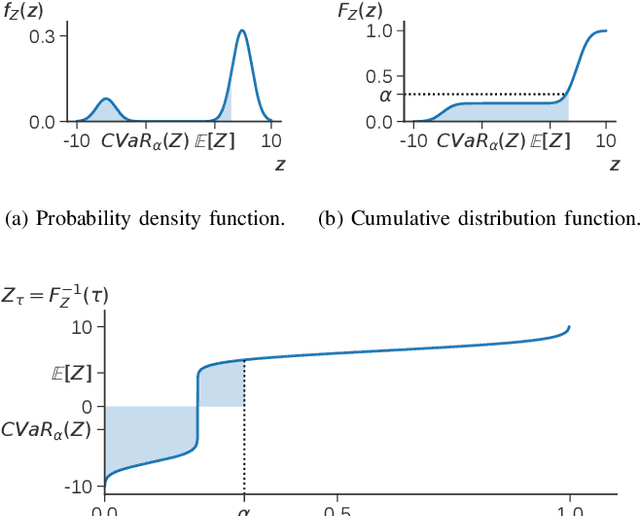
Reinforcement learning (RL) can be used to create a decision-making agent for autonomous driving. However, previous approaches provide only black-box solutions, which do not offer information on how confident the agent is about its decisions. An estimate of both the aleatoric and epistemic uncertainty of the agent's decisions is fundamental for real-world applications of autonomous driving. Therefore, this paper introduces the Ensemble Quantile Networks (EQN) method, which combines distributional RL with an ensemble approach, to obtain a complete uncertainty estimate. The distribution over returns is estimated by learning its quantile function implicitly, which gives the aleatoric uncertainty, whereas an ensemble of agents is trained on bootstrapped data to provide a Bayesian estimation of the epistemic uncertainty. A criterion for classifying which decisions that have an unacceptable uncertainty is also introduced. The results show that the EQN method can balance risk and time efficiency in different occluded intersection scenarios, by considering the estimated aleatoric uncertainty. Furthermore, it is shown that the trained agent can use the epistemic uncertainty information to identify situations that the agent has not been trained for and thereby avoid making unfounded, potentially dangerous, decisions outside of the training distribution.