 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy-Efficient UAV Communications: A Generalised Propulsion Energy Consumption Model
Paper and Code
Feb 17, 2022
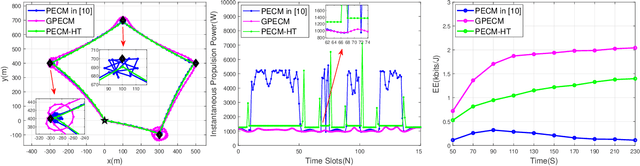
This paper proposes a generalised propulsion energy consumption model (PECM) for rotary-wing ummanned aerial vehicles (UAVs) under the consideration of the practical thrust-to-weight ratio (TWR) with respect to the velocity, acceleration and direction change of the UAVs. To verify the effectiveness of the proposed PECM, we consider a UAV-enabled communication system, where a rotary-wing UAV serves multiple ground users as an aerial base station. We aim to maximize the energy efficiency (EE) of the UAV by jointly optimizing the user scheduling and UAV trajectory variables. However, the formulated problem is a non-convex fractional integer programming problem, which is challenging to obtain its optimal solution. To tackle this, we propose an efficient iterative algorithm by decomposing the original problem into two sub-problems to obtain a suboptimal solution based on the successive convex approximation technique. Simulation results show that the optimized UAV trajectory by applying the proposed PECM are smoother and the corresponding EE has significant improvement as compared to other benchmark schemes.