 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-To-End Optimization of LiDAR Beam Configuration for 3D Object Detection and Localization
Paper and Code


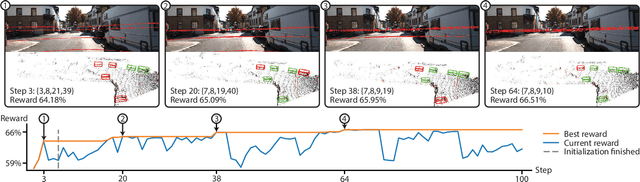
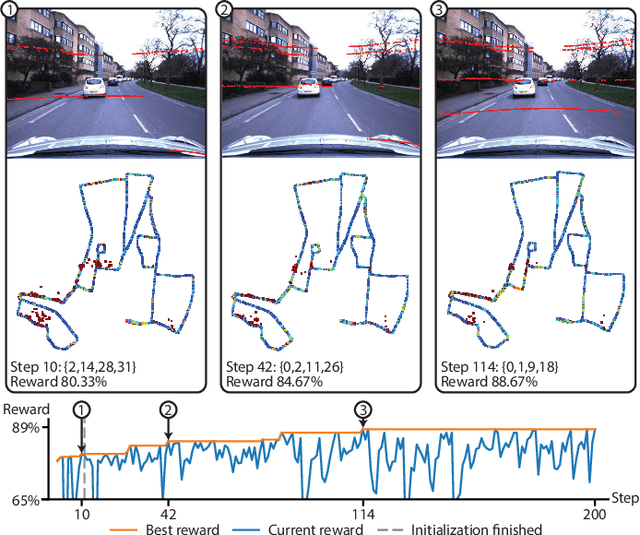
Existing learning methods for LiDAR-based applications use 3D points scanned under a pre-determined beam configuration, e.g., the elevation angles of beams are often evenly distributed. Those fixed configurations are task-agnostic, so simply using them can lead to sub-optimal performance. In this work, we take a new route to learn to optimize the LiDAR beam configuration for a given application. Specifically, we propose a reinforcement learning-based learning-to-optimize (RL-L2O) framework to automatically optimize the beam configuration in an end-to-end manner for different LiDAR-based applications. The optimization is guided by the final performance of the target task and thus our method can be integrated easily with any LiDAR-based application as a simple drop-in module. The method is especially useful when a low-resolution (low-cost) LiDAR is needed, for instance, for system deployment at a massive scale. We use our method to search for the beam configuration of a low-resolution LiDAR for two important tasks: 3D object detection and localization. Experiments show that the proposed RL-L2O method improves the performance in both tasks significantly compared to the baseline methods. We believe that a combination of our method with the recent advances of programmable LiDARs can start a new research direction for LiDAR-based active perception. The code is publicly available at https://github.com/vniclas/lidar_beam_selection