 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmulating Human Kinematic Behavior on Lower-Limb Prostheses via Multi-Contact Models and Force-Based Nonlinear Control
Paper and Code
Sep 27, 2022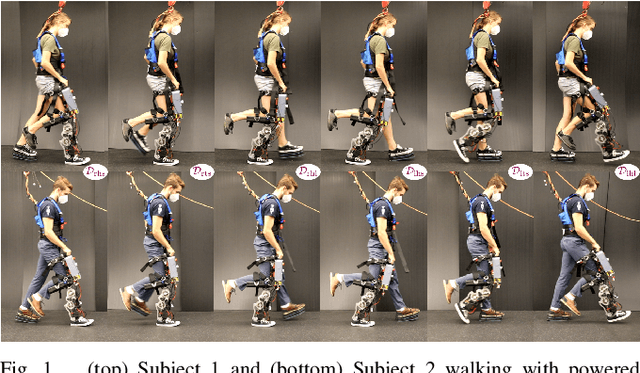
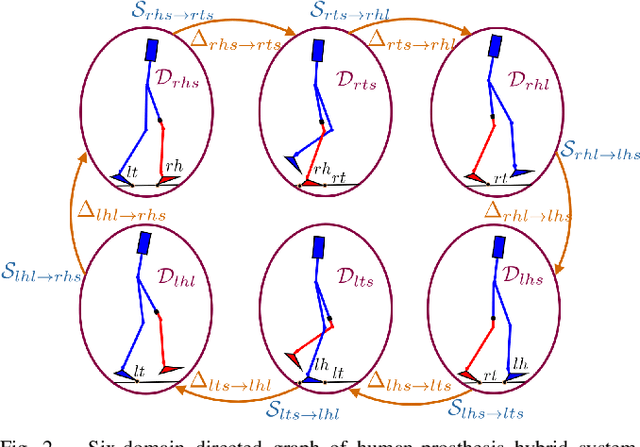
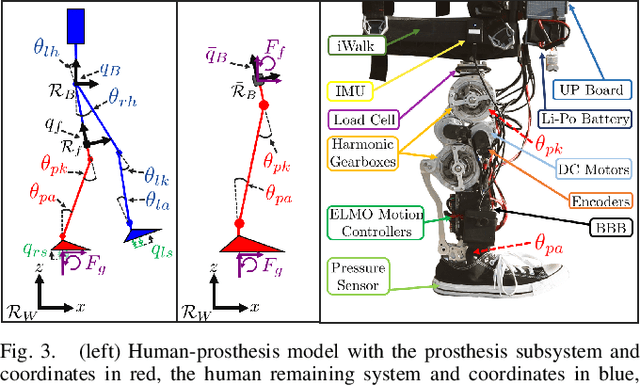
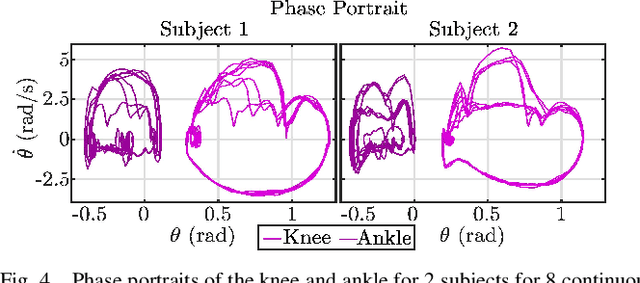
Ankle push-off largely contributes to limb energy generation in human walking, leading to smoother and more efficient locomotion. Providing this net positive work to an amputee requires an active prosthesis, but has the potential to enable more natural assisted locomotion. To this end, this paper uses multi-contact models of locomotion together with force-based nonlinear optimization-based controllers to achieve human-like kinematic behavior, including ankle push-off, on a powered transfemoral prosthesis for 2 subjects. In particular, we leverage model-based control approaches for dynamic bipedal robotic walking to develop a systematic method to realize human-like walking on a powered prosthesis that does not require subject-specific tuning. We begin by synthesizing an optimization problem that yields gaits that resemble human joint trajectories at a kinematic level, and realize these gaits on a prosthesis through a control Lyapunov function based nonlinear controller that responds to real-time ground reaction forces and interaction forces with the human. The proposed controller is implemented on a prosthesis for two subjects without tuning between subjects, emulating subject-specific human kinematic trends on the prosthesis joints. These experimental results demonstrate that our force-based nonlinear control approach achieves better tracking of human kinematic trajectories than traditional methods.