Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmergence of Spatial Coordinates via Exploration
Paper and Code
Oct 29, 2020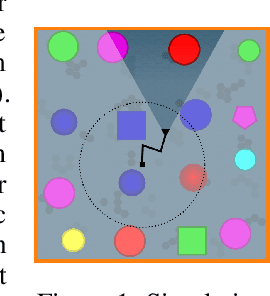
Spatial knowledge is a fundamental building block for the development of advanced perceptive and cognitive abilities. Traditionally, in robotics, the Euclidean (x,y,z) coordinate system and the agent's forward model are defined a priori. We show that a naive agent can autonomously build an internal coordinate system, with the same dimension and metric regularity as the external space, simply by learning to predict the outcome of sensorimotor transitions in a self-supervised way.
* 4 pages, 2 figures, BabyMind Workshop at NeurIPS 2020
View paper on