 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Pipelines for Vision-Based Context Sensing
Paper and Code
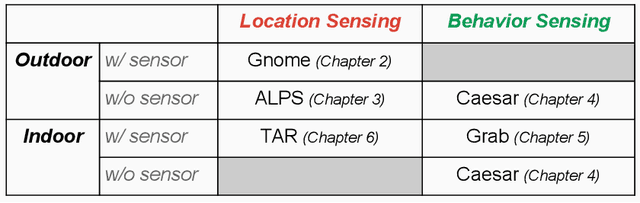
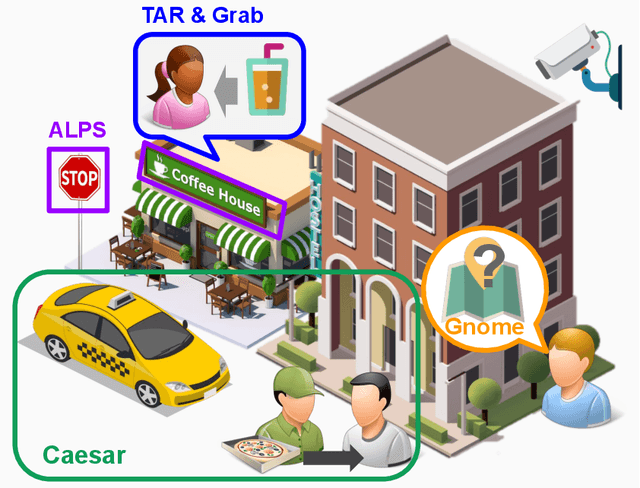

Context awareness is an essential part of mobile and ubiquitous computing. Its goal is to unveil situational information about mobile users like locations and activities. The sensed context can enable many services like navigation, AR, and smarting shopping. Such context can be sensed in different ways including visual sensors. There is an emergence of vision sources deployed worldwide. The cameras could be installed on roadside, in-house, and on mobile platforms. This trend provides huge amount of vision data that could be used for context sensing. However, the vision data collection and analytics are still highly manual today. It is hard to deploy cameras at large scale for data collection. Organizing and labeling context from the data are also labor intensive. In recent years, advanced vision algorithms and deep neural networks are used to help analyze vision data. But this approach is limited by data quality, labeling effort, and dependency on hardware resources. In summary, there are three major challenges for today's vision-based context sensing systems: data collection and labeling at large scale, process large data volumes efficiently with limited hardware resources, and extract accurate context out of vision data. The thesis explores the design space that consists of three dimensions: sensing task, sensor types, and task locations. Our prior work explores several points in this design space. We make contributions by (1) developing efficient and scalable solutions for different points in the design space of vision-based sensing tasks; (2) achieving state-of-the-art accuracy in those applications; (3) and developing guidelines for designing such sensing systems.