 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEffects of Faults, Experience, and Personality on Trust in a Robot Co-Worker
Paper and Code
Mar 09, 2017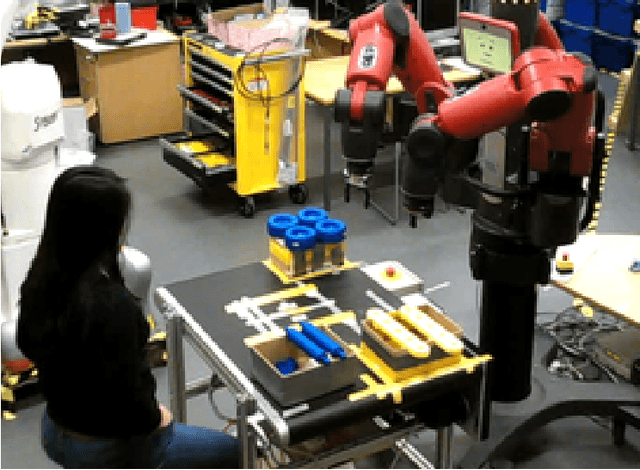


To design trustworthy robots, we need to understand the impact factors of trust: people's attitudes, experience, and characteristics; the robot's physical design, reliability, and performance; a task's specification and the circumstances under which it is to be performed, e.g. at leisure or under time pressure. As robots are used for a wide variety of tasks and applications, robot designers ought to be provided with evidence and guidance, to inform their decisions to achieve safe, trustworthy and efficient human-robot interactions. In this work, the impact factors of trust in a collaborative manufacturing scenario are studied by conducting an experiment with a real robot and participants where a physical object was assembled and then disassembled. Objective and subjective measures were employed to evaluate the development of trust, under faulty and non-faulty robot conditions, and the effect of previous experience with robots, and personality traits. Our findings highlight differences when compared to other, more social, scenarios with robotic assistants (such as a home care assistant), in that the condition (faulty or not) does not have a significant impact on the human's perception of the robot in terms of human-likeliness, likeability, trustworthiness, and even competence. However, personality and previous experience do have an effect on how the robot is perceived by participants, even though that is relatively small.