Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEdge-enhancing Filters with Negative Weights
Paper and Code
Sep 08, 2015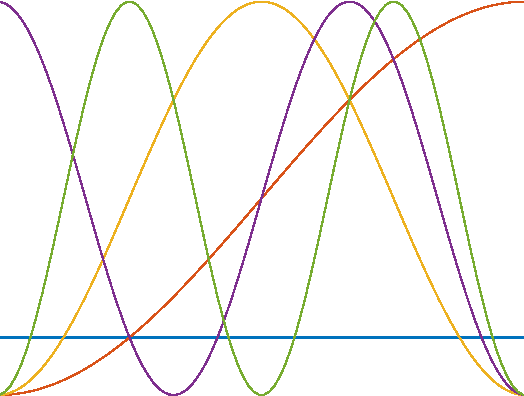
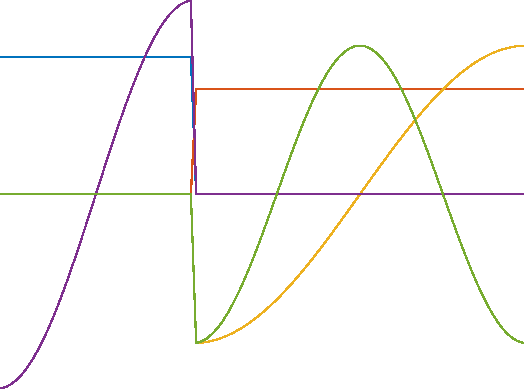
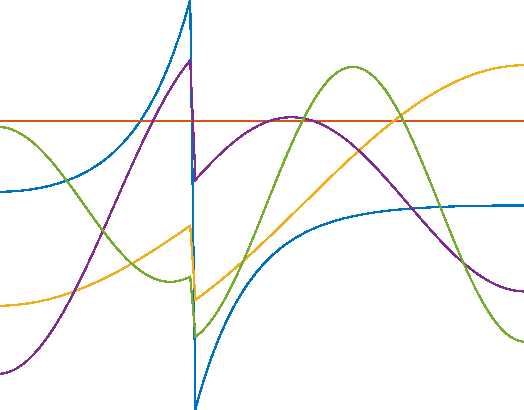
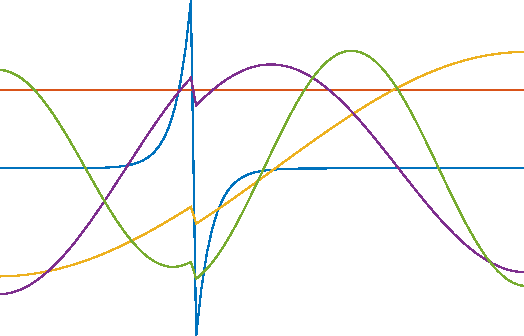
In [DOI:10.1109/ICMEW.2014.6890711], a graph-based denoising is performed by projecting the noisy image to a lower dimensional Krylov subspace of the graph Laplacian, constructed using nonnegative weights determined by distances between image data corresponding to image pixels. We~extend the construction of the graph Laplacian to the case, where some graph weights can be negative. Removing the positivity constraint provides a more accurate inference of a graph model behind the data, and thus can improve quality of filters for graph-based signal processing, e.g., denoising, compared to the standard construction, without affecting the costs.
* 2015 IEEE Global Conference on Signal and Information Processing
(GlobalSIP), Orlando, FL, 14-16 Dec.2015, pp. 260 - 264 * 5 pages; 6 figures. Accepted to IEEE GlobalSIP 2015 conference
View paper on