 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Systems Simulation and Control Using Consecutive Recurrent Neural Networks
Paper and Code
Feb 25, 2020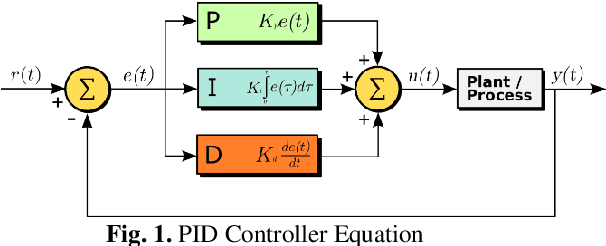
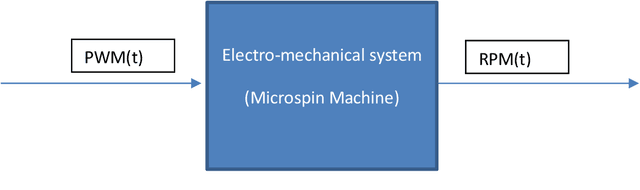
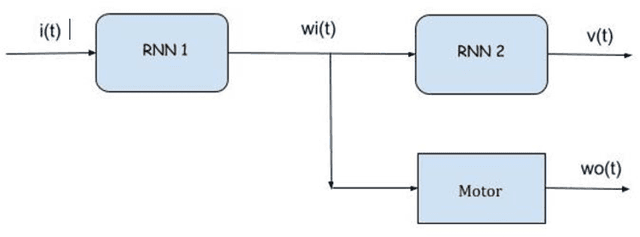
In this paper, we introduce a novel architecture to connecting adaptive learning and neural networks into an arbitrary machine's control system paradigm. Two consecutive Recurrent Neural Networks (RNNs) are used together to accurately model the dynamic characteristics of electromechanical systems that include controllers, actuators and motors. The age-old method of achieving control with the use of the- Proportional, Integral and Derivative constants is well understood as a simplified method that does not capture the complexities of the inherent nonlinearities of complex control systems. In the context of controlling and simulating electromechanical systems, we propose an alternative to PID controllers, employing a sequence of two Recurrent Neural Networks. The first RNN emulates the behavior of the controller, and the second the actuator/motor. The second RNN when used in isolation, potentially serves as an advantageous alternative to extant testing methods of electromechanical systems.