 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic modeling of wing-assisted inclined running with a morphing multi-modal robot
Paper and Code
Nov 16, 2023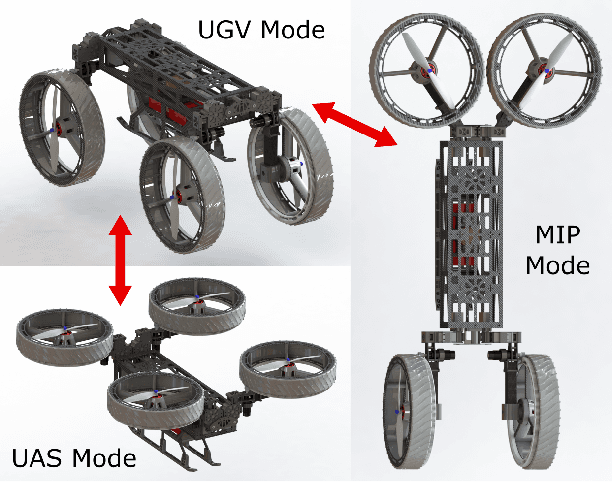
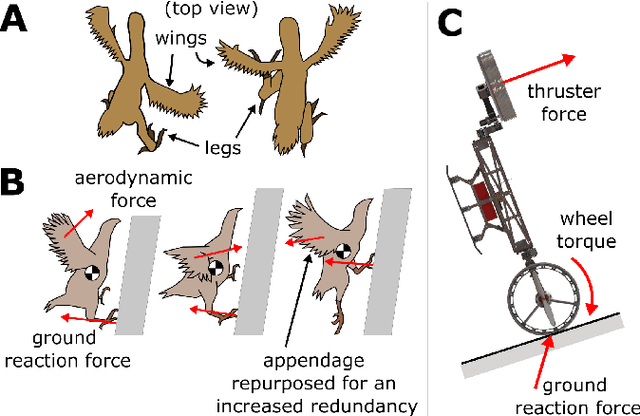
Robot designs can take many inspirations from nature, where there are many examples of highly resilient and fault-tolerant locomotion strategies to navigate complex terrains by using multi-functional appendages. For example, Chukar and Hoatzin birds can repurpose their wings for quadrupedal walking and wing-assisted incline running (WAIR) to climb steep surfaces. We took inspiration from nature and designed a morphing robot with multi-functional thruster-wheel appendages that allows the robot to change its mode of locomotion by transforming into a rover, quad-rotor, mobile inverted pendulum (MIP), and other modes. In this work, we derive a dynamic model and formulate a nonlinear model predictive controller to perform WAIR to showcase the unique capabilities of our robot. We implemented the model and controller in a numerical simulation and experiments to show their feasibility and the capabilities of our transforming multi-modal robot.