 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDyLoc: Dynamic Localization for Massive MIMO Using Predictive Recurrent Neural Networks
Paper and Code
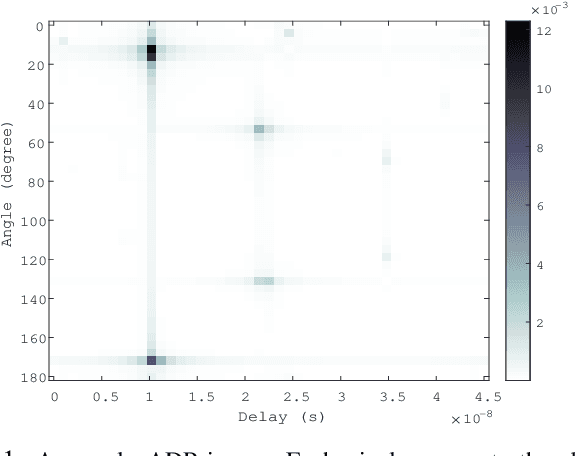
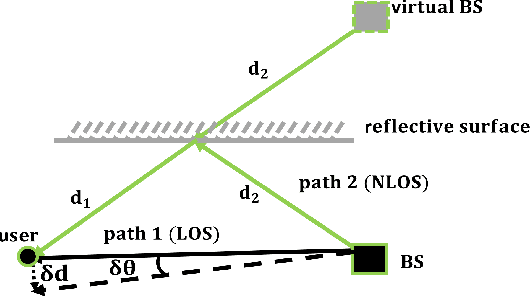
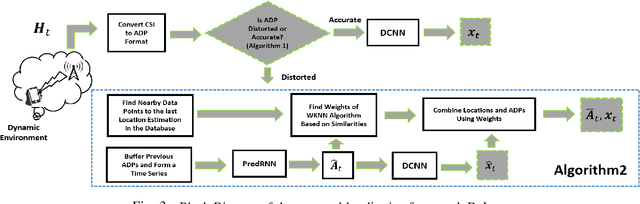
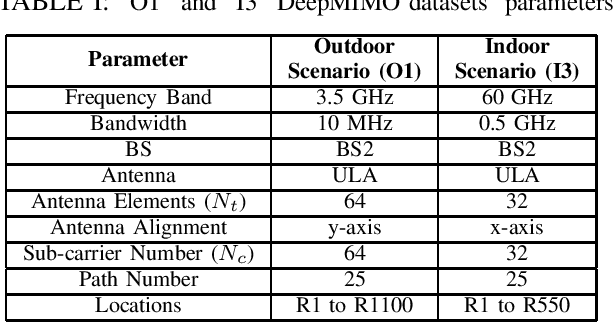
This paper presents a data-driven localization framework with high precision in time-varying complex multipath environments, such as dense urban areas and indoors, where GPS and model-based localization techniques come short. We consider the angle-delay profile (ADP), a linear transformation of channel state information (CSI), in massive MIMO systems and show that ADPs preserve users' motion when stacked temporally. We discuss that given a static environment, future frames of ADP time-series are predictable employing a video frame prediction algorithm. We express that a deep convolutional neural network (DCNN) can be employed to learn the background static scattering environment. To detect foreground changes in the environment, corresponding to path blockage or addition, we introduce an algorithm taking advantage of the trained DCNN. Furthermore, we present DyLoc, a data-driven framework to recover distorted ADPs due to foreground changes and to obtain precise location estimations. We evaluate the performance of DyLoc in several dynamic scenarios employing DeepMIMO dataset to generate geo-tagged CSI datasets for indoor and outdoor environments. We show that previous DCNN-based techniques fail to perform with desirable accuracy in dynamic environments, while DyLoc pursues localization precisely. Moreover, simulations show that as the environment gets richer in terms of the number of multipath, DyLoc gets more robust to foreground changes.