 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDPC-Net: Deep Pose Correction for Visual Localization
Paper and Code
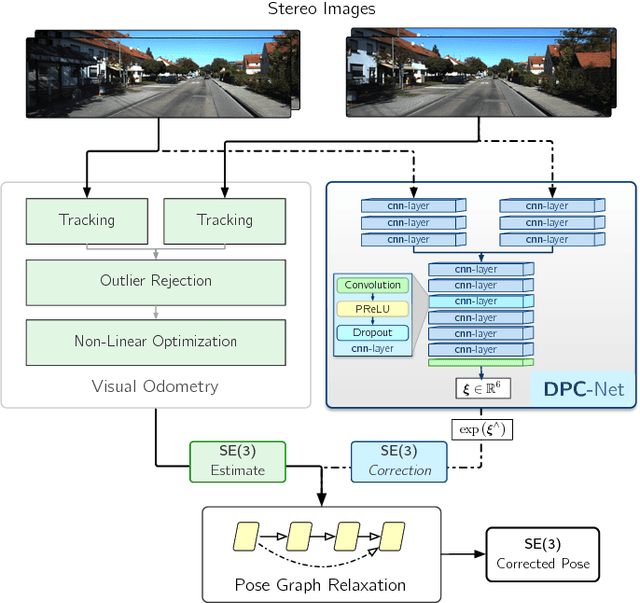

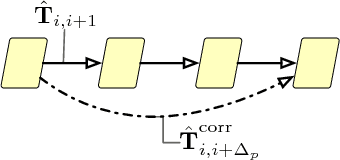

We present a novel method to fuse the power of deep networks with the computational efficiency of geometric and probabilistic localization algorithms. In contrast to other methods that completely replace a classical visual estimator with a deep network, we propose an approach that uses a convolutional neural network to learn difficult-to-model corrections to the estimator from ground-truth training data. To this end, we derive a novel loss function for learning SE(3) corrections based on a matrix Lie groups approach, with a natural formulation for balancing translation and rotation errors. We use this loss to train a Deep Pose Correction network (DPC-Net) that predicts corrections for a particular estimator, sensor and environment. Using the KITTI odometry dataset, we demonstrate significant improvements to the accuracy of a computationally-efficient sparse stereo visual odometry pipeline, that render it as accurate as a modern computationally-intensive dense estimator. Further, we show how DPC-Net can be used to mitigate the effect of poorly calibrated lens distortion parameters.