Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDomestic waste detection and grasping points for robotic picking up
Paper and Code
May 14, 2021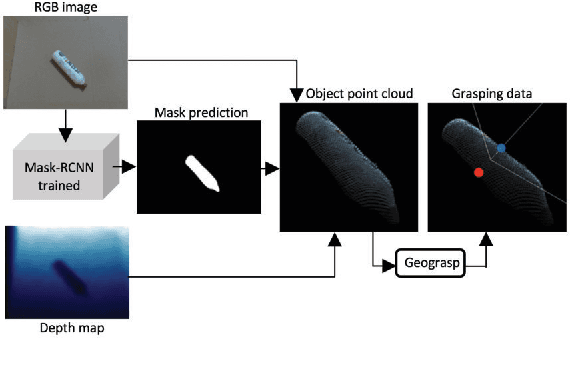
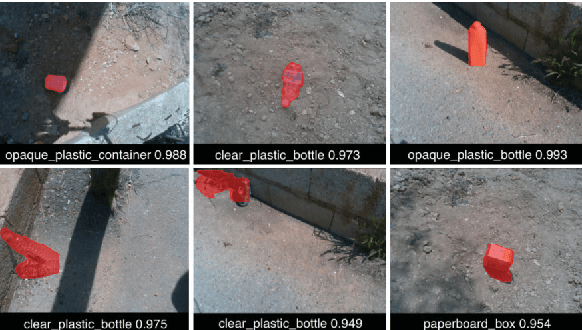
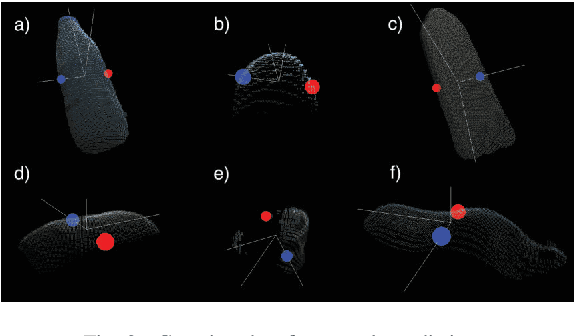
This paper presents an AI system applied to location and robotic grasping. Experimental setup is based on a parameter study to train a deep-learning network based on Mask-RCNN to perform waste location in indoor and outdoor environment, using five different classes and generating a new waste dataset. Initially the AI system obtain the RGBD data of the environment, followed by the detection of objects using the neural network. Later, the 3D object shape is computed using the network result and the depth channel. Finally, the shape is used to compute grasping for a robot arm with a two-finger gripper. The objective is to classify the waste in groups to improve a recycling strategy.
* 2 pages, 3 figures, accepted as poster for presentation in ICRA 2021
Workshop: Emerging paradigms for robotic manipulation: from the lab to the
productive world
View paper on