 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDomain-Adversarial and -Conditional State Space Model for Imitation Learning
Paper and Code
Jan 31, 2020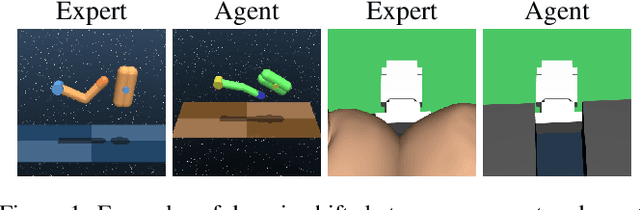
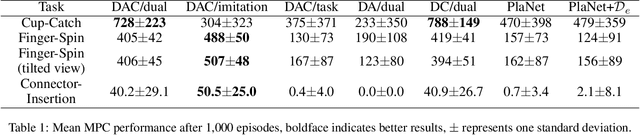
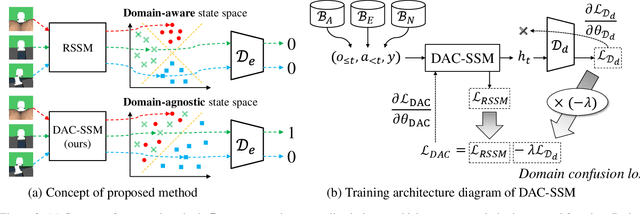

State representation learning (SRL) in partially observable Markov decision processes has been studied to learn abstract features of data useful for robot control tasks. For SRL, acquiring domain-agnostic states is essential for achieving efficient imitation learning (IL). Without these states, IL is hampered by domain-dependent information useless for control. However, existing methods fail to remove such disturbances from the states when the data from experts and agents show large domain shifts. To overcome this issue, we propose a domain-adversarial and -conditional state space model (DAC-SSM) that enables control systems to obtain domain-agnostic and task- and dynamics-aware states. DAC-SSM jointly optimizes the state inference, observation reconstruction, forward dynamics, and reward models. To remove domain-dependent information from the states, the model is trained with domain discriminators in an adversarial manner, and the reconstruction is conditioned on domain labels. We experimentally evaluated the model predictive control performance via IL for continuous control of sparse reward tasks in simulators and compared it with the performance of the existing SRL method. The agents from DAC-SSM achieved performance comparable to experts and more than twice the baselines. We conclude domain-agnostic states are essential for IL that has large domain shifts and can be obtained using DAC-SSM.