 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDo We Need to Compensate for Motion Distortion and Doppler Effects in Radar-Based Navigation?
Paper and Code
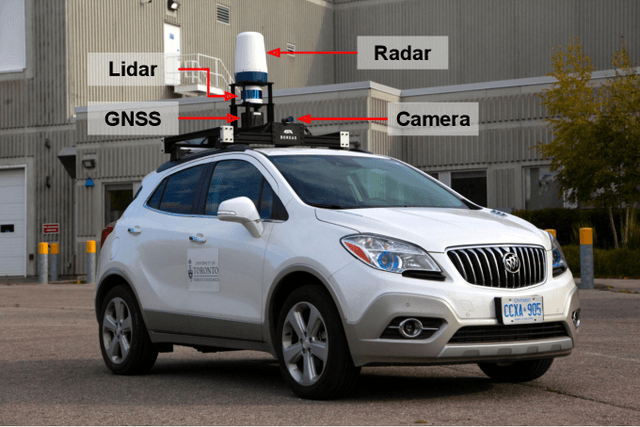

In order to tackle the challenge of unfavorable weather conditions such as rain and snow, radar is being revisited as a parallel sensing modality to vision and lidar. Recent works have made tremendous progress in applying radar to odometry and place recognition. However, these works have so far ignored the impact of motion distortion and Doppler effects on radar-based navigation, which may be significant in the self-driving car domain where speeds can be high. In this work, we demonstrate the effect of these distortions on radar-only odometry using the Oxford Radar RobotCar Dataset and metric localization using our own data-taking platform. We present a lightweight estimator that can recover the motion between a pair of radar scans while accounting for both effects. Our conclusion is that both motion distortion and the Doppler effect are significant in different aspects of radar navigation, with the former more prominent than the latter.