 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiverse Plausible 360-Degree Image Outpainting for Efficient 3DCG Background Creation
Paper and Code
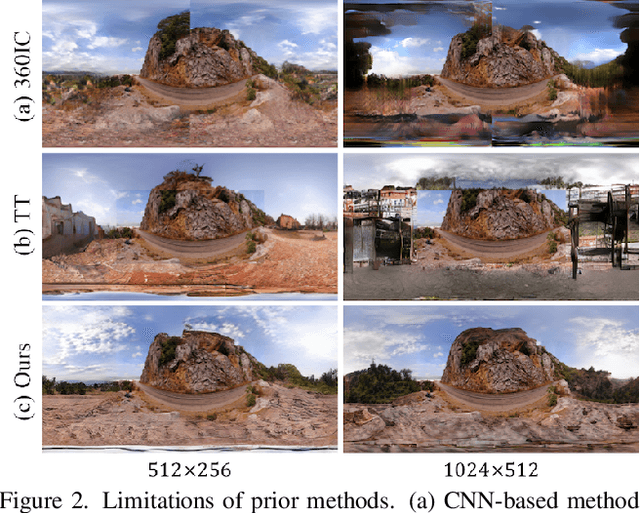
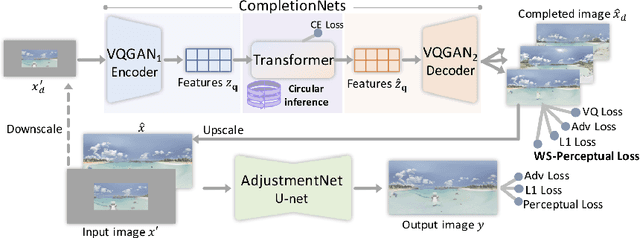
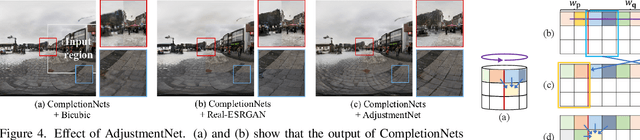

We address the problem of generating a 360-degree image from a single image with a narrow field of view by estimating its surroundings. Previous methods suffered from overfitting to the training resolution and deterministic generation. This paper proposes a completion method using a transformer for scene modeling and novel methods to improve the properties of a 360-degree image on the output image. Specifically, we use CompletionNets with a transformer to perform diverse completions and AdjustmentNet to match color, stitching, and resolution with an input image, enabling inference at any resolution. To improve the properties of a 360-degree image on an output image, we also propose WS-perceptual loss and circular inference. Thorough experiments show that our method outperforms state-of-the-art (SOTA) methods both qualitatively and quantitatively. For example, compared to SOTA methods, our method completes images 16 times larger in resolution and achieves 1.7 times lower Frechet inception distance (FID). Furthermore, we propose a pipeline that uses the completion results for lighting and background of 3DCG scenes. Our plausible background completion enables perceptually natural results in the application of inserting virtual objects with specular surfaces.