Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Optimization with Consensus Constraint for Multi-Robot Semantic Octree Mapping
Paper and Code
Feb 14, 2024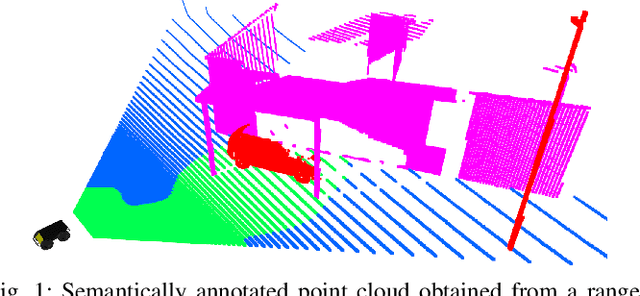
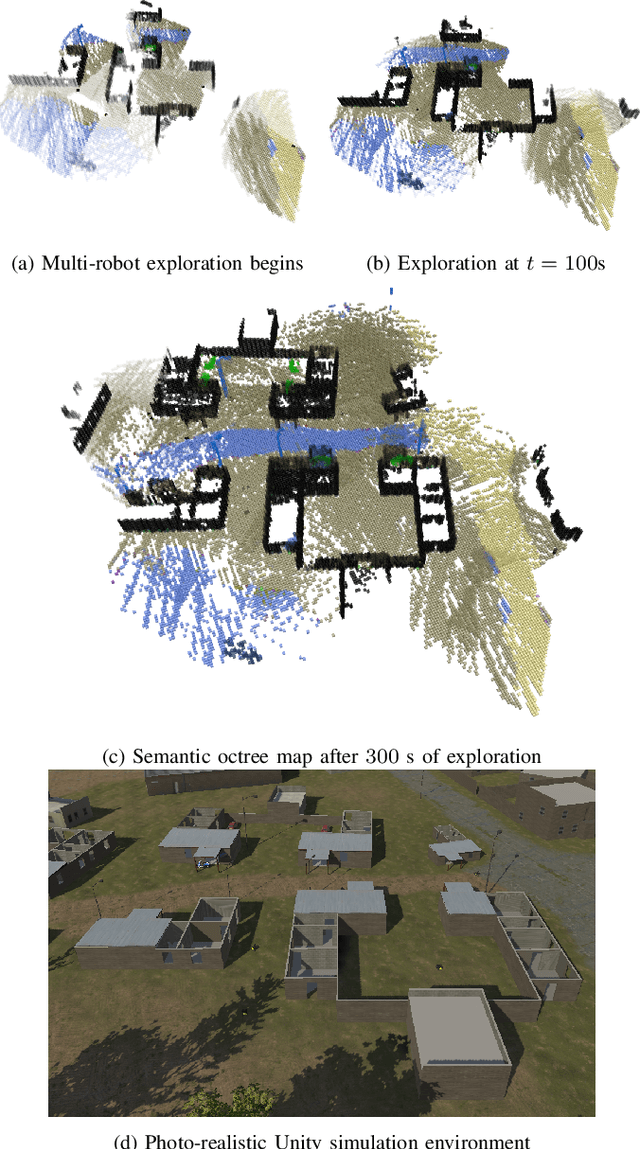
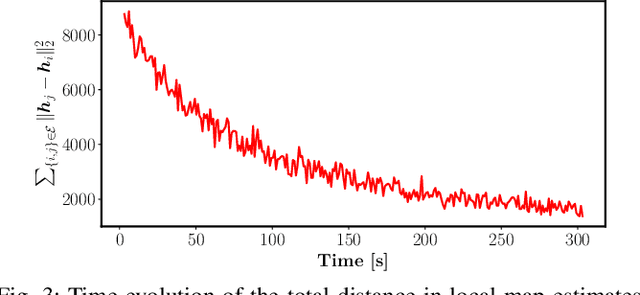
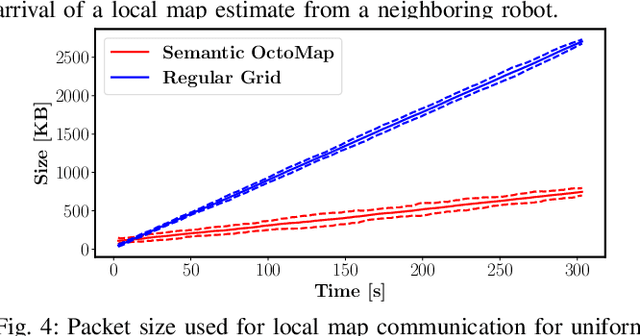
This work develops a distributed optimization algorithm for multi-robot 3-D semantic mapping using streaming range and visual observations and single-hop communication. Our approach relies on gradient-based optimization of the observation log-likelihood of each robot subject to a map consensus constraint to build a common multi-class map of the environment. This formulation leads to closed-form updates which resemble Bayes rule with one-hop prior averaging. To reduce the amount of information exchanged among the robots, we utilize an octree data structure that compresses the multi-class map distribution using adaptive-resolution.
View paper on