 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDirection matters: hand pose estimation from local surface normals
Paper and Code
Apr 10, 2016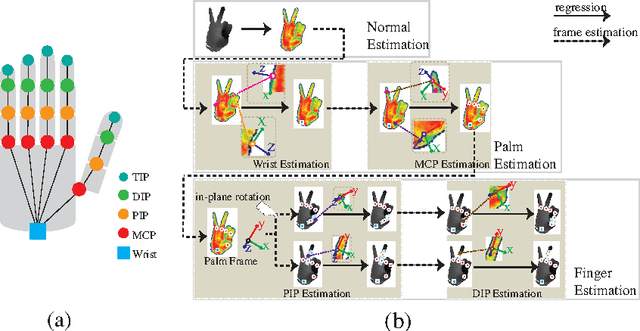
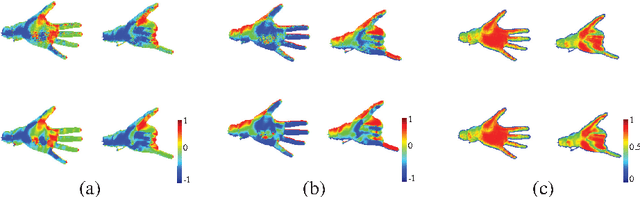
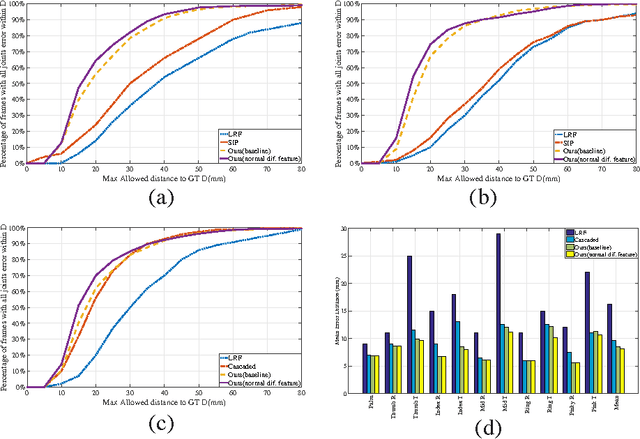

We present a hierarchical regression framework for estimating hand joint positions from single depth images based on local surface normals. The hierarchical regression follows the tree structured topology of hand from wrist to finger tips. We propose a conditional regression forest, i.e., the Frame Conditioned Regression Forest (FCRF) which uses a new normal difference feature. At each stage of the regression, the frame of reference is established from either the local surface normal or previously estimated hand joints. By making the regression with respect to the local frame, the pose estimation is more robust to rigid transformations. We also introduce a new efficient approximation to estimate surface normals. We verify the effectiveness of our method by conducting experiments on two challenging real-world datasets and show consistent improvements over previous discriminative pose estimation methods.