 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDirect NMPC for Post-Stall Motion Planning with Fixed-Wing UAVs
Paper and Code
Jan 30, 2020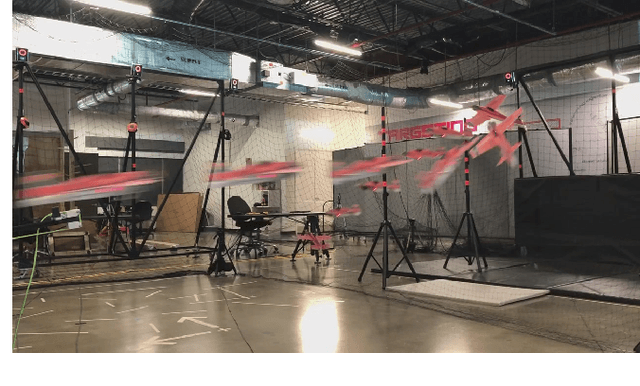
Fixed-wing unmanned aerial vehicles (UAVs) offer significant performance advantages over rotary-wing UAVs in terms of speed, endurance, and efficiency. However, these vehicles have traditionally been severely limited with regards to maneuverability. In this paper, we present a nonlinear control approach for enabling aerobatic fixed-wing UAVs to maneuver in constrained spaces. Our approach utilizes full-state direct trajectory optimization and a minimalistic, but representative, nonlinear aircraft model to plan aggressive fixed-wing trajectories in real-time at 5 Hz across high angles-of-attack. Randomized motion planning is used to avoid local minima and local-linear feedback is used to compensate for model inaccuracies between updates. We demonstrate our method in hardware and show that both local-linear feedback and re-planning are necessary for successful navigation of a complex environment in the presence of model uncertainty.