 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDifferentiable Biomechanics Unlocks Opportunities for Markerless Motion Capture
Paper and Code
Feb 27, 2024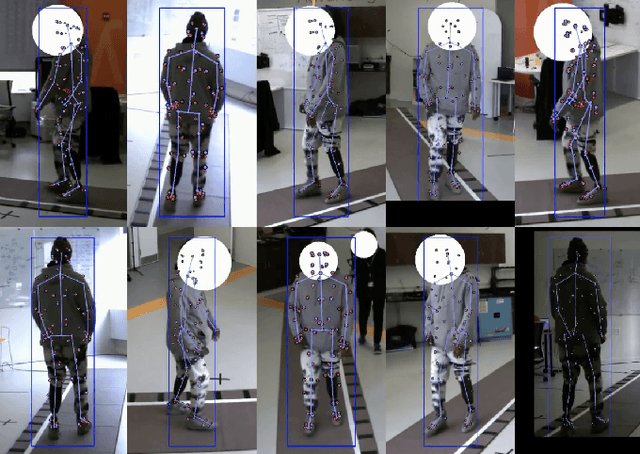
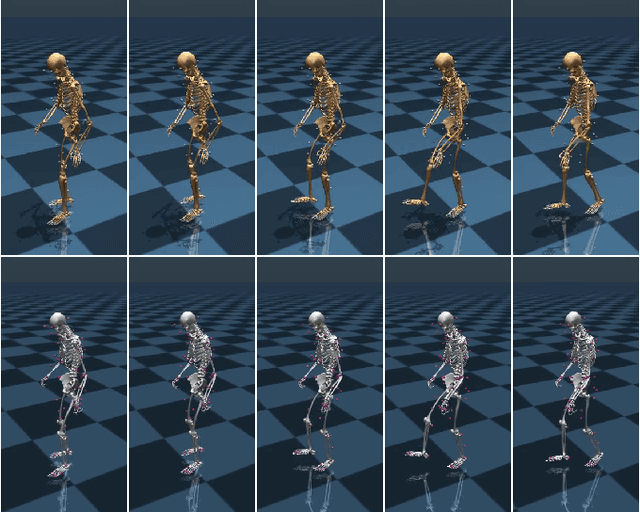
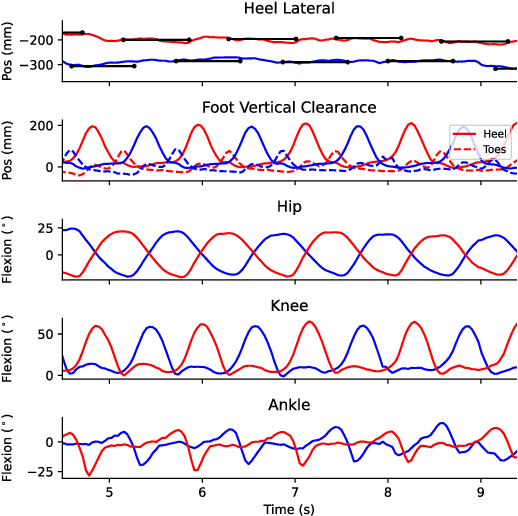
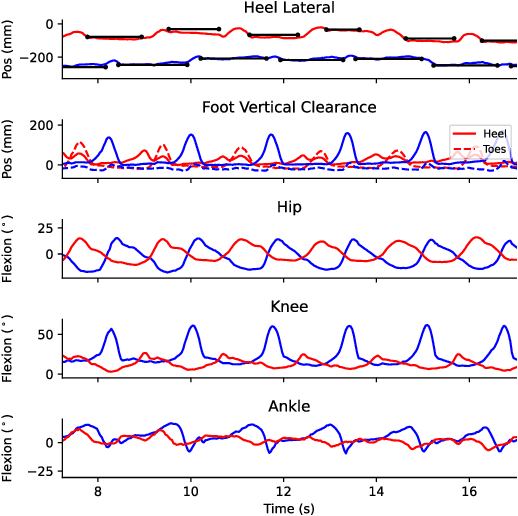
Recent developments have created differentiable physics simulators designed for machine learning pipelines that can be accelerated on a GPU. While these can simulate biomechanical models, these opportunities have not been exploited for biomechanics research or markerless motion capture. We show that these simulators can be used to fit inverse kinematics to markerless motion capture data, including scaling the model to fit the anthropomorphic measurements of an individual. This is performed end-to-end with an implicit representation of the movement trajectory, which is propagated through the forward kinematic model to minimize the error from the 3D markers reprojected into the images. The differential optimizer yields other opportunities, such as adding bundle adjustment during trajectory optimization to refine the extrinsic camera parameters or meta-optimization to improve the base model jointly over trajectories from multiple participants. This approach improves the reprojection error from markerless motion capture over prior methods and produces accurate spatial step parameters compared to an instrumented walkway for control and clinical populations.