 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeveloping Computational Models of Social Assistance to Guide Socially Assistive Robots
Paper and Code
Sep 14, 2019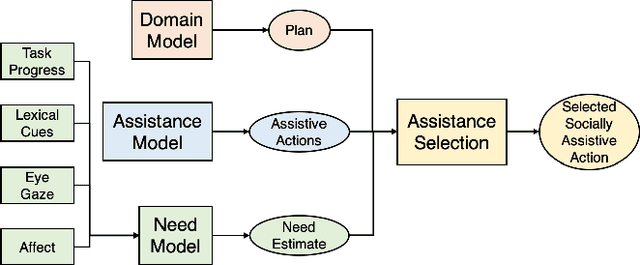
While there are many examples in which robots provide social assistance, a lack of theory on how the robots should decide how to assist impedes progress in realizing these technologies. To address this deficiency, we propose a pair of computational models to guide a robot as it provides social assistance. The model of social autonomy helps a robot select an appropriate assistance that will help with the task at hand while also maintaining the autonomy of the person being assisted. The model of social alliance describes how a to determine whether the robot and the person being assisted are cooperatively working towards the same goal. Each of these models are rooted in social reasoning between people, and we describe here our ongoing work to adapt this social reasoning to human-robot interactions.